научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2010
DOI: 10.7463/0910.0157912
УДК 519.6
МГТУ им. Н.Э. Баумана,
apkarpenko@mail.ru
Введение
Известной альтернативой традиционным манипуляторам являются манипуляторы, построенные на основе механизмов параллельной кинематики [1]. Такие манипуляторы обладают более высокой маневренностью, могут обеспечивать высокую точность позиционирования схвата, имеют высокие допустимые нагрузки, используют однотипные приводы (например, только линейные). С другой стороны, эти манипуляторы требуют использования большого количества приводов и более сложных систем управления, имеют меньший размер рабочей области и более высокую стоимость, более сложны в проектировании. Указанные недостатки не являются препятствием для все более широкого распространения параллельных манипуляторов в тех областях, в которых требуется высокая маневренность, точное позиционирование и высокие нагрузки.
В работе рассматриваются односекционный и трехсекционный манипуляторы, построенные на основе одного из наиболее известных механизмов параллельной кинематики - платформы Стюарта (гексапода) [1].
В отличие от традиционных манипуляторов, манипуляторы на основе гексапода имеют замкнутые кинематические цепи и воспринимают нагрузку как пространственные фермы. Т.е. в данном случае штанги этих механизмов работают на растяжение-сжатие, что ведет к повышению жесткости всей конструкции и, как следствие, к повышению точности позиционирования и грузоподъемности механизмов [2]. Обзор одно- и многосекционных манипуляторов, построенных на основе гексаподов, дан в публикации [3].
Работа выполнена в контексте исследований, посвященных разработке научных основ роботов-манипуляторов типа «хобот», построенных на базе механизмов параллельной кинематики. Варианты структуры секций таких манипуляторов рассмотрены в работах [4, 5].
Для математического моделирования манипуляторов параллельной кинематики наиболее удобны в использовании программные комплексы блочного моделирования, которые имеют в качестве входного языка графический язык иерархических блок-схем [6]. Наиболее известными представителями этих комплексов являются MatLab/Simulink(MathWorks, Inc.), EASY5 (Boeing), MATRIXX/SystemBuild (IntegratedSystems, Inc. ), VisSim (VisualSolution, Inc.). В работе, как наиболее доступный и полнофункциональный, используется программный комплекс MatLab/Simulink [7].
1. Постановка задачи
Вообще говоря, в качестве приводов (актуаторов) линейных перемещений штанг гексапода могут быть использованы гидравлические, пневматические и электрические приводы. Каждый из этих приводов обладает своими достоинствами и недостатками. В работе в качестве приводов штанг, как односекционного, так и трехсекционного манипуляторов рассматриваются электрические приводы, которые имеют невысокую цену, большой ресурс и достаточно компактны.
Полагается, что в качестве систем управления приводами штанг используются двухконтурные системы управления на основе ПИД-регуляторов. Структура системы управления приводом ![]() -ой штанги представлена на рисунке 1, где
-ой штанги представлена на рисунке 1, где ![]() ,
, ![]() - требуемый и реализованный законы изменения длины штанги,
- требуемый и реализованный законы изменения длины штанги, ![]() ,
, ![]() - соответствующие скорость и ускорение.
- соответствующие скорость и ускорение.

Рисунок 1 – Структура системы управления штангой гексапода
Коэффициенты при пропорциональной, интегральной и дифференциальной составляющих ПИД-регуляторов обозначим ![]() соответственно;
соответственно; ![]() Отметим, что частным случаем ПИД-регулятора является П-регулятор (когда
Отметим, что частным случаем ПИД-регулятора является П-регулятор (когда ![]() ).
).
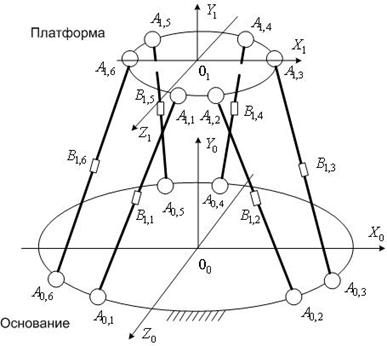
1.1. Односекционный манипулятор на основе гексапода состоит из неподвижного основания, подвижной платформы и шести штанг, каждая из которых состоит из двух пулуштанг и активной поступательной кинематической пары (привода) - рисунок 2.
Система координат ![]() на рисунке 2 представляет собой инерциальную систему, центр которой связан с центром основания (точкой
на рисунке 2 представляет собой инерциальную систему, центр которой связан с центром основания (точкой ![]() ), система координат
), система координат ![]() - подвижная система, центр которой связан с центром масс платформы (точкой
- подвижная система, центр которой связан с центром масс платформы (точкой ![]() ).
).
![]() - шарниры Гука;
- шарниры Гука; ![]() - сферические шарниры;
- сферические шарниры;
![]() – поступательные кинематические пары
– поступательные кинематические пары
Рисунок 2 - Схема односекционного манипулятора
Механизм имеет тринадцать подвижных звеньев и восемнадцать кинематических пар. Легко показать, что его подвижность равна шести [3].
Введем следующие обозначения (![]() ):
):
· ![]() - диаметр окружности, на которой лежат точки крепления штанг к основанию;
- диаметр окружности, на которой лежат точки крепления штанг к основанию; ![]() мм;
мм;
· ![]() - диаметр окружности, на которой лежат точки крепления штанг к платформе;
- диаметр окружности, на которой лежат точки крепления штанг к платформе; ![]() мм;
мм;
· ![]() - толщина платформы;
- толщина платформы; ![]() мм;
мм;
· ![]() - масса платформы;
- масса платформы; ![]() 0,1 кг (материал платформы - алюминий);
0,1 кг (материал платформы - алюминий);
· ![]() - длина
- длина ![]() -ой штанги;
-ой штанги;
· ![]() - диаметр штанги;
- диаметр штанги; ![]() мм;
мм;
· ![]() - масса штанги с приводом;
- масса штанги с приводом; ![]() кг;
кг;
· ![]() ,
, ![]() - нижняя и верхняя предельные высоты центра платформы (точки
- нижняя и верхняя предельные высоты центра платформы (точки ![]() );
); ![]() мм,
мм, ![]() мм;
мм;
· ![]() - масса схвата манипулятора.
- масса схвата манипулятора.
Кроме того, примем следующие обозначения:
· ![]() - скорость изменения длины
- скорость изменения длины ![]() -ой штанги;
-ой штанги;
· ![]() - ускорение изменения длины этой штанги.
- ускорение изменения длины этой штанги.
Положим, что ![]() массы штанги сосредоточено в ее середине (в месте соединения полуштанг). Указанное распределение массы штанги моделирует ее привод. Схват манипулятора представляется в виде точечной массы, расположенной на оси
массы штанги сосредоточено в ее середине (в месте соединения полуштанг). Указанное распределение массы штанги моделирует ее привод. Схват манипулятора представляется в виде точечной массы, расположенной на оси ![]() на расстоянии 50 мм от точки
на расстоянии 50 мм от точки ![]() . Рассматриваются следующие варианты:
. Рассматриваются следующие варианты: ![]() =0, 5, 10, 15, 20 кг.
=0, 5, 10, 15, 20 кг.
1.2. Трехсекционный манипулятор. В этом манипуляторе платформа первого гексапода является основанием второго, а платформа второго гексапода – основанием третьего.
Легко видеть, что подвижность трехступенчатого манипулятора равна 18.
Введем следующие обозначения (![]() ,
, ![]() ):
):
· ![]() - диаметр окружности, на которой лежат точки крепления штанг к
- диаметр окружности, на которой лежат точки крепления штанг к ![]() -ой платформе;
-ой платформе; ![]() мм;
мм; ![]() мм;
мм; ![]() мм;
мм;
· ![]() - толщина платформы;
- толщина платформы; ![]() мм;
мм;
· ![]() - масса платформы;
- масса платформы; ![]() кг;
кг; ![]() кг;
кг; ![]() кг (материал платформ – алюминий);
кг (материал платформ – алюминий);
· ![]() - диаметр штанг, связывающих
- диаметр штанг, связывающих ![]() -ю платформу с предыдущей платформой или с основанием гексапода (для первой платформы),
-ю платформу с предыдущей платформой или с основанием гексапода (для первой платформы), ![]() мм;
мм;
· ![]() ,
, ![]() ,
, ![]() - аналогично определяемые длины штанг, скорости и ускорения изменения их длин, соответственно;
- аналогично определяемые длины штанг, скорости и ускорения изменения их длин, соответственно;
· ![]() - масса каждой из указанных штанг с приводом;
- масса каждой из указанных штанг с приводом; ![]() кг;
кг;
· ![]() - высота
- высота ![]() -ой секции манипулятора;
-ой секции манипулятора; ![]() ;
; ![]() ;
; ![]() ;
;
· ![]() ,
, ![]() - нижняя и верхняя предельные высоты
- нижняя и верхняя предельные высоты ![]() -ой секции.
-ой секции.
Закон распределения масс всех штанг полагается таким же, как в односекционном манипуляторе. Полагается также, что относительно схвата действуют соглашения, принятые в п. 1.1.
Аналогично тому, как это показано на рисунке 2, свяжем с основанием манипулятора инерциальную систему координат ![]() , а с центром
, а с центром ![]() -ой платформы (точкой
-ой платформы (точкой ![]() ) – подвижную систему координат
) – подвижную систему координат ![]() .
.
2. Математическая модель односекционного манипулятора
CATIA-модель [8] односекционного манипулятора представлена на рисунке 3.
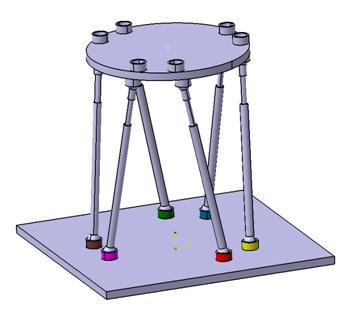
Рисунок 3 – CATIA-модель односекционного манипулятора
Эксперименты с этой моделью позволили определить диапазоны изменения длин штанг манипулятора, которые обеспечивают исходное и два его крайних положения (рисунки 4 – 6): ![]() ;
; ![]() ;
; ![]() .
.
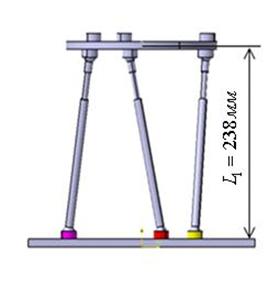

Рисунок 4 – Исходное положение манипулятора: ![]()
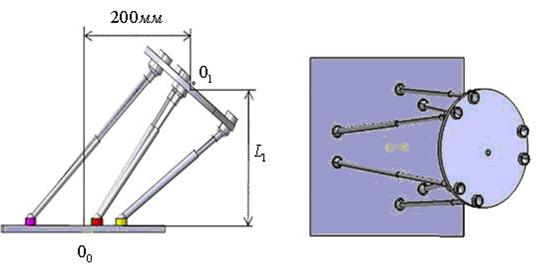
Рисунок 5 – Крайнее правое положение манипулятора: ![]()
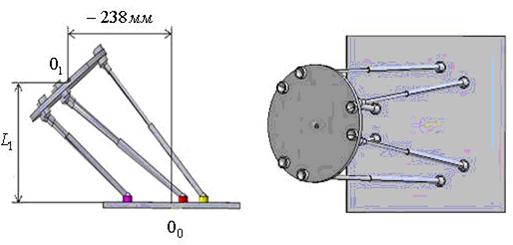
Рисунок 6 – Крайнее левое положение манипулятора: ![]()
Разработана иерархическая Simulink-модель односекционного манипулятора, включающая в себя четыре следующих уровня:
1) структурный уровень;
2) уровень описания ступени манипулятора;
3) уровень описания штанги манипулятора;
4) уровень описания системы управления манипулятором.
Модель манипулятора на структурном уровне приведена на рисунке 7.
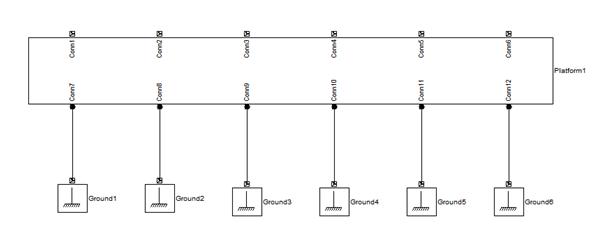
Рисунок 7 – Simulink-модель односекционного манипулятора: структурный уровень
Модель второго иерархического уровня представляет рисунок 8.

Рисунок 8 – Simulink-модель односекционного манипулятора – второй иерархический уровень
Здесь Body1 – модель платформы, Body – модель схвата, Leg1 - Leg6 – модели штанг, CG – датчик положения центра масс платформы в пространстве, Body_a – датчик линейных ускорений схвата. Платформа в модели Body1 представляет собой однородное жесткое цилиндрическое тело.
На рисунке 9 представлена модель штанги Legбез датчиков, а на рисунке 10 - та же модель, но с датчиками.

Рисунок 9 – Simulink-модель штанги с системой управления
(датчики отсутствуют)
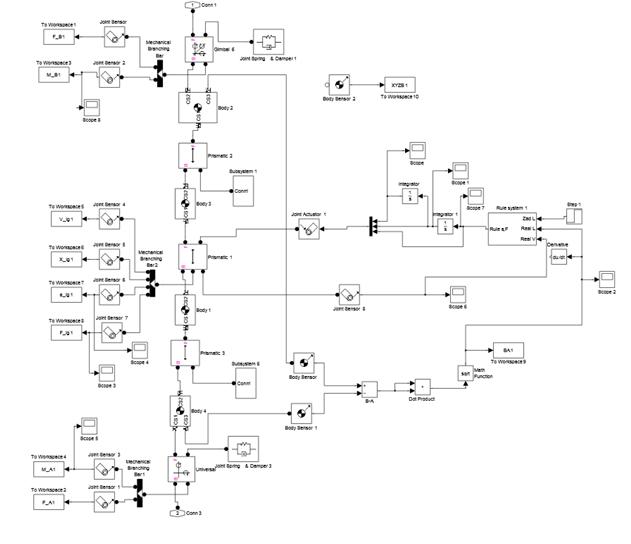
Рисунок 10 – Simulink-модель штанги с системой управления и датчиками
Модель штанги состоит из блоков Body1, Body2, Body3, Body4, которые соединены между собой блоками Prismatic, моделирующими линейные перемещения. Блок Prismatic1 представляет собой модель кинематической пары. Блоки Prismatic 2, Prismatic 3 предназначены для моделирования упругостей штанг (в развитие работы). В данной модели указанные блоки служат только для объединения блоков Body2, Body3 и блоков Body1, Body4 соответственно. Отметим, что 2/3 массы штанги сосредоточены в блоках Body1, Body3, а 1/3 массы - в блоках Body2, Body4. Блоки Body2, Body4 соединены с блоками Gimbal6 и Universal, которые представляют собой модели сферического шарнира и универсального шарнира (шарнира Гука), соответственно. Блоки JointSpring&Damperмоделируют силы трения в указанных шарнирах; блок Rule system 1 представляет собой модель системы управления штангой.
Модель, представленная на рисунке 10, включает в себя датчики JointSensor, которые измеряют значения следующих величины:
· F_B1 - усилие в шарнире;
· M_B1 – момент в шарнире;
· V_lg1 – скорость перемещения штока актуатора;
· X_lg1 – величину перемещения штока актуатора;
· a_lg1 – ускорение штока актуатора;
· F_lg1 – усилия в актуаторе;
· M_A1 – моменты сил в универсальном шарнире;
· F_A1 – усилие в универсальном шарнире;
· BA1 – изменение длины штанги манипулятора.
Модель системы управления Rule system 1 представлена на рисунке 11. Модель включает в себя модели двух ПИД-регуляторов (п. 1), а также модели нелинейностей типа «насыщение» Saturation.
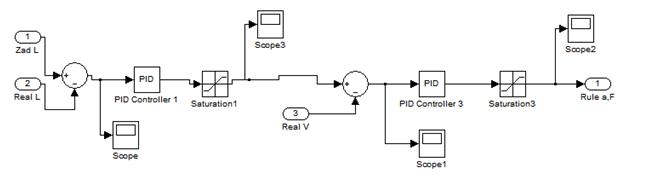
Рисунок 11 – Simulink-модель системы управления длиной штанги
3. Динамика односекционного манипулятора
Рассмотрим движение манипулятора, при котором центр масс платформы ![]() остается в плоскости симметрии манипулятора
остается в плоскости симметрии манипулятора ![]() . При этом, очевидно, кинематика и динамика штанги
. При этом, очевидно, кинематика и динамика штанги ![]() оказывается такой же, как штанги
оказывается такой же, как штанги ![]() , штанги
, штанги ![]() - такой же, как штанги
- такой же, как штанги ![]() , штанги
, штанги ![]() - такой же, как штанги
- такой же, как штанги ![]() (рисунок 4). Это позволяет вместо шести штанг говорить только о трех штангах
(рисунок 4). Это позволяет вместо шести штанг говорить только о трех штангах ![]() ,
, ![]() ,
, ![]() , которые далее называются первой, второй и третьей штангами соответственно.
, которые далее называются первой, второй и третьей штангами соответственно.
Введем следующие обозначения (![]() ,
,![]() ):
):
· ![]() - осевое усилие в приводе
- осевое усилие в приводе ![]() -ой штанги;
-ой штанги;
· ![]() ,
, ![]() ,
, ![]() - проекции усилия
- проекции усилия ![]() на оси
на оси ![]() ,
,![]() ,
,![]() системы координат
системы координат ![]() соответственно;
соответственно;
· ![]() - момент в шарнире
- момент в шарнире ![]() ;
;
· ![]() ,
, ![]() ,
, ![]() - проекции момента
- проекции момента ![]() на соответствующие оси системы координат
на соответствующие оси системы координат ![]() .
.
3.1. Исследование переходных процессов в односекционном манипуляторе выполнено для случая использования пропорциональных регуляторов: ![]() ,
, ![]() ,
, ![]() ;
; ![]() ,
, ![]() ,
, ![]() . Здесь значения коэффициентов
. Здесь значения коэффициентов ![]() ,
, ![]() подобраны таким образом, чтобы при массе схвата
подобраны таким образом, чтобы при массе схвата ![]() кг время переходного процесса составляло примерно 2.5 с. Длины
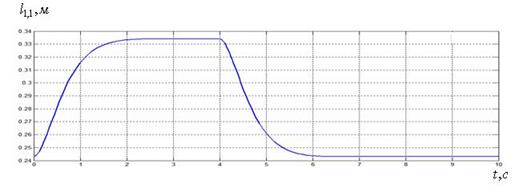
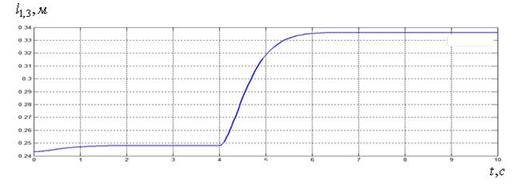
кг время переходного процесса составляло примерно 2.5 с. Длины ![]()
![]()
![]() первой (и шестой), второй (и пятой), третьей (и четвертой) штанг изменялись по законам, приведенным на рисунке 12.
первой (и шестой), второй (и пятой), третьей (и четвертой) штанг изменялись по законам, приведенным на рисунке 12.
а)

б)
в)
Рисунок 12 – Изменение во времени длин штанг односекционного манипулятора
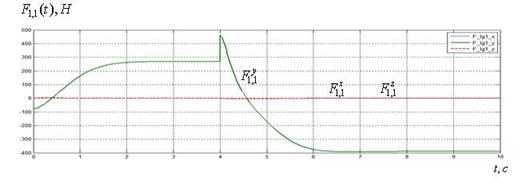
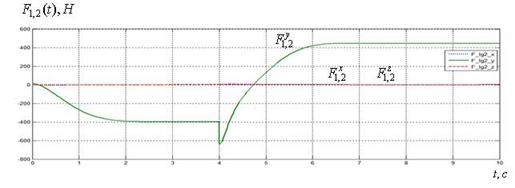
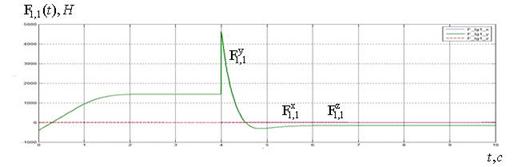
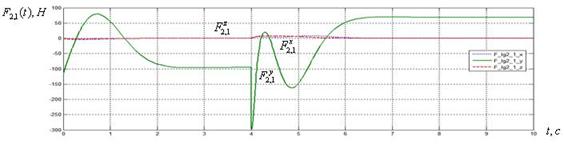
Характер изменения соответствующих осевых усилий в приводах иллюстрирует рисунок 13. Отметим, что установившиеся значения этих усилий отличны от нуля, поскольку обеспечивают компенсацию силы тяжести элементов манипулятора и схвата.
а)
б)

в)
Рисунок 13 – Изменение во времени осевых усилий в приводах штанг односекционного манипулятора
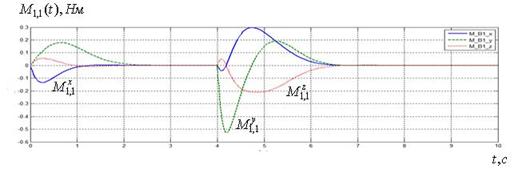
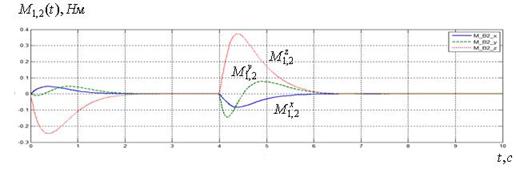
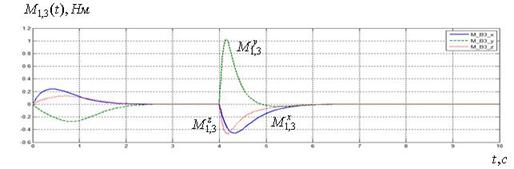
На рисунке 14 представлены моменты в шарнирах ![]() ,
, ![]() ,
, ![]() . Отметим, что эти моменты обусловлены силами трения в шарнирах и отличны от нуля только в те периоды времени, когда угловые скорости вращения штанг также отличны от нуля.
. Отметим, что эти моменты обусловлены силами трения в шарнирах и отличны от нуля только в те периоды времени, когда угловые скорости вращения штанг также отличны от нуля.
а)
б)
в)
Рисунок 14 – Изменение во времени моментов в шарнирах ![]() ,
, ![]() ,
, ![]() односекционного манипулятора
односекционного манипулятора
Представляют интерес также графики изменения во времени ускорения схвата ![]() и координат центра масс платформы
и координат центра масс платформы ![]() ,
, ![]() ,
, ![]() (точки
(точки ![]() ), представленные на рисунках 15, 16 соответственно. Первый из указанных рисунков показывает, что в условиях исследования перегрузка схвата достигает 0.46 единиц.
), представленные на рисунках 15, 16 соответственно. Первый из указанных рисунков показывает, что в условиях исследования перегрузка схвата достигает 0.46 единиц.
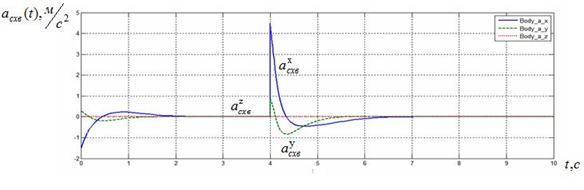
Рисунок 15 – Изменение во времени ускорения схвата односекционного манипулятора
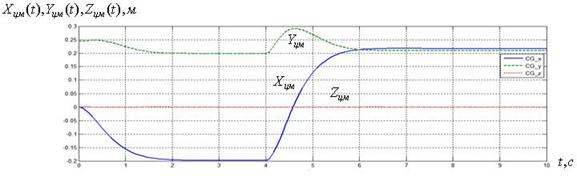
Рисунок 16 – Координаты центра масс платформы односекционного манипулятора в функции времени
3.2. Исследование предельных усилий в приводах. На первом этапе в данном разделе изучаются предельные осевые усилия в приводах манипулятора при варьировании коэффициентов ПИД-регуляторов и массы схвата (таблица 1).
Таблица 1 - Варианты настроек ПИД-регуляторов
Вариант | Коэффициенты ПИД-регуляторов | |||||
|
|
|
|
|
| |
а | 1,5 | 0 | 0 | 5.0 | 0 | 0 |
б | 2,0 | 0 | 0 | 8,0 | 0 | 0,2 |
в | 2,0 | 0 | 0 | 7,0 | 0 | 0,3 |
г | 2,5 | 0,1 | 0,2 | 8,0 | 0,1 | 0 |
д | 2,5 | 0,1 | 0,2 | 8,0 | 0,1 | 0 |
Все приведенные в таблице 1 варианты настроек регуляторов обеспечивает время переходного процесса, равное ~2,5 с. Заметим, что в варианте а) оба ПИД-регулятора являются П-регуляторами, в вариантах б), в) - П- и ПД-регуляторами, в вариантах г), д) – ПИД- и ПИ-регуляторами, соответсвенно.
В таблице 2 представлены предельные осевые усилия ![]() , возникающие в приводе первой штанги манипулятора.
, возникающие в приводе первой штанги манипулятора.
Таблица 2 – Предельные максимальные (знак плюс) и минимальные (знак минус) осевые усилия в приводе первой штанги
Вариант настроек регуляторов | Усилие | ||||
|
|
|
|
| |
а) | 86; -32 | 161; -122 | 252; -211 | 353; -301 | 458; -392 |
б) | 110; -32 | 202; -121 | 329; -210 | 462; -300 | 600; -390 |
в) | 100; -32 | 185; -122 | 296; -213 | 415; -304 | 526; -395 |
г) | 137; -37 | 260; -127 | 424; -222 | 612; -316 | 728; -409 |
д) | 136; -35 | 263; -136 | 428; -236 | 602; -337 | 774; -437 |
Аналогичные данные для привода второй штанги представлены в таблице 3.
Таблица 3 – Предельные осевые усилия в приводе второй штанги
Вариант настроек регуляторов | Усилие | ||||
|
|
|
|
| |
а) | 38; -126 | 140; -230 | 242; -356 | 344; -493 | 446; -637 |
б) | 42; -160 | 139; -284.2 | 240; -447 | 342; -626 | 443; -817 |
в) | 39; -146 | 141; -253 | 244; -412 | 347;-570 | 450; -730 |
г) | 50; -198 | 147; -360 | 256; -570 | 364; -818 | 470; -986 |
д) | 48; -196 | 159; -363 | 275; -583 | 392; -813 | 509; -1042 |
Предельные осевые усилия в приводах третьей штанги меньше по модулю соответствующих усилий в приводах первой и второй штанг и поэтому не рассматриваются.
Таблицы 2, 3 иллюстрируют рисунки 17, 18.
На втором этапе выполнено исследование предельных радиальных усилий в приводах штанг. Максимальные радиальные усилия имеют место в приводе третьей штанги манипулятора. Эти усилия в рассматриваемом диапазоне изменения массы схвата (0 - 20 кг) не зависят от этой массы и составляют приближенно 12, 16, 15, 20, 21 Н для вариантов а), б), в), г), д) настроек регуляторов соответственно.

Рисунок 17 – Зависимость максимальных осевых усилий в приводах односекционного манипулятора от массы схвата

Рисунок 18 – Зависимость минимальных осевых усилий в приводах односекционного манипулятора от массы схвата
4. Математическая модель трехсекционного манипулятора
Как и для односекционного манипулятора, в данном случает также предварительно была разработана CATIA-модель манипулятора (рисунок 19). На рисунках 20 – 21 представлены исходное и крайние положения этого манипулятора.
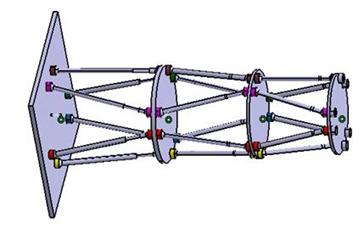
Рисунок 19 – CATIA-модель трехсекционного манипулятора

Рисунок 20 – Исходное положение манипулятора

Рисунок 21 – Крайнее правое положение манипулятора
Эксперименты с CATIA-моделью манипулятора позволили определить диапазоны изменения длин штанг каждой из секций, которые обеспечивают требуемые диапазоны изменения высот этих секций (п. 1): ![]() ,
, ![]() ;
; ![]() ,
, ![]() ;
; ![]() ,
, ![]() ;
; ![]() .
.
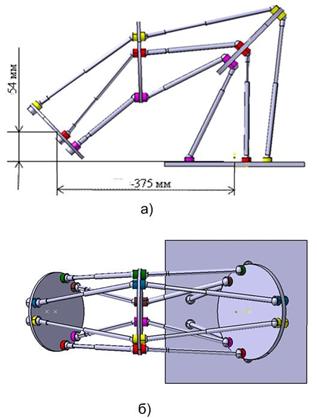
Рисунок 22 – Крайнее левое положение манипулятора
Как и Simulink-модель односекционного манипулятора, модель трехсекционного манипулятора имеет четыре иерархических уровня, из которых от первой из моделей отличается только структурный уровень (рисунок 23).
5. Исследование динамики трехсекционного манипулятора
Манипулятор в исходном положении полагается симметричным относительно плоскости ![]() . Рассматривается движение манипулятора, при котором центр масс третьей платформы
. Рассматривается движение манипулятора, при котором центр масс третьей платформы ![]() остается в этой плоскости. Кинематика и динамика штанг
остается в этой плоскости. Кинематика и динамика штанг ![]() оказывается при этом такой же, как штанг
оказывается при этом такой же, как штанг ![]() , штанг
, штанг ![]() - такой же, как штанг
- такой же, как штанг ![]() , штанг
, штанг ![]() - такой же, как штанги
- такой же, как штанги ![]() ;
; ![]() . Это позволяет говорить далее только о штангах
. Это позволяет говорить далее только о штангах ![]() ,
, ![]() ,
, ![]() , которые называются первой, второй и третьей штангами соответствующей секции манипулятора.
, которые называются первой, второй и третьей штангами соответствующей секции манипулятора.

Рисунок 23 – Simulink-модель трехсекционного манипулятора:
структурный уровень
Введем следующие обозначения (![]() ):
):
· ![]() - усилие в приводе
- усилие в приводе ![]() -ой штанги
-ой штанги ![]() -ой секции;
-ой секции;
· ![]() ,
, ![]() ,
, ![]() - проекции усилия
- проекции усилия ![]() на оси
на оси ![]() ,
, ![]() ,
, ![]() системы координат
системы координат ![]() соответственно.
соответственно.
5.1. Исследование переходных процессов в трехсекционном манипуляторе выполнено, как и в односекционном манипуляторе, для пропорциональных регуляторов, коэффициенты которых имеют значения: ![]() ,
, ![]() ,
, ![]() ;
; ![]() ,
, ![]() ,
, ![]() . Масса схвата принята равной
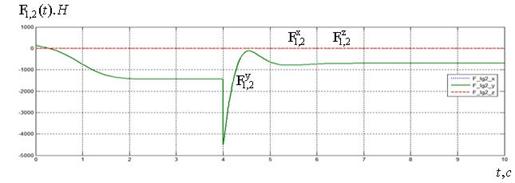
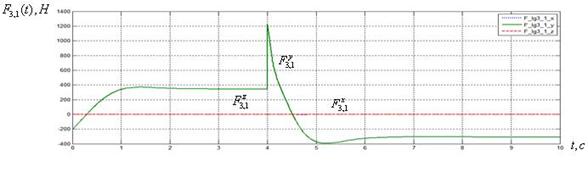
. Масса схвата принята равной ![]() кг. Длины первой (и шестой), второй (и пятой), третьей (и четвертой) штанг первой секции манипулятора изменялись по законам, приведенным на рисунке 12. Графики соответствующих осевых усилий в приводах первой секции иллюстрирует рисунок 24.
кг. Длины первой (и шестой), второй (и пятой), третьей (и четвертой) штанг первой секции манипулятора изменялись по законам, приведенным на рисунке 12. Графики соответствующих осевых усилий в приводах первой секции иллюстрирует рисунок 24.
а)
б)
в)
Рисунок 24 – Изменение во времени осевых усилий в приводах первой секции трехсекционного манипулятора
Из рисунка 24 следует, что по сравнению с односекционным манипулятором максимальные осевые усилия в приводах штанг первой ступени трехсекционного манипулятора больше примерно в 10 (10; 9) раз для приводов первой (второй; третьей) штанг, соответственно.
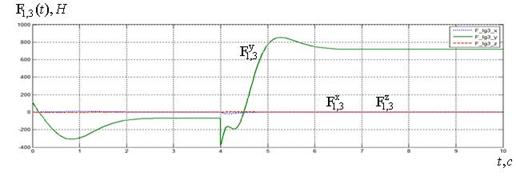
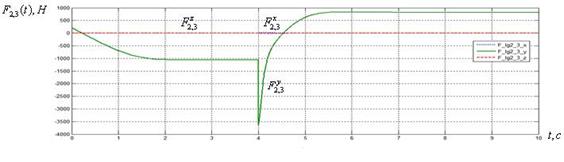
Аналогичные графики для приводов второй секции приведены на рисунке 25, а для приводов третьей секции – на рисунке 26.
а)

б)
в)
Рисунок 25 – Изменение во времени осевых усилий в приводах второй секции трехсекционного манипулятора
а)

б)
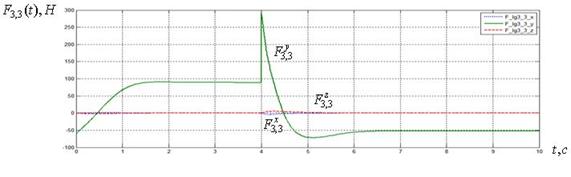
Рисунок 26 – Изменение во времени осевых усилий в приводах третьей секции трехсекционного манипулятора
Рисунки 24 – 26 показывают, что максимальное осевое усилие в приводе первой штанги третьей секции примерно в 3,7 раз меньше, чем соответствующее максимальное усилие в приводе первой секции; в приводах второй и третьей штанг - в три раза меньше, чем в соответствующих приводах первой секции.
Изменение во времени ускорения схвата иллюстрирует рисунок 27.

Рисунок 27 – Изменение во времени ускорения схвата в трехсекционном манипуляторе
Из рисунка 27 следует, что максимальная перегрузка схвата достигает, в условиях исследования, 2,3 единиц.
5.2. Исследование максимальных усилий в приводах выполнено для вариантов а), г) настроек ПИД-регуляторов (таблица 1).
Отметим прежде, что исследование максимально достижимого ускорения схвата массой ![]() кг показывает, что при использовании варианта а) настроек ПИД-регулятора это ускорение составляет 2,5 единицы, а при использовании варианта г) – 6,9 единиц.
кг показывает, что при использовании варианта а) настроек ПИД-регулятора это ускорение составляет 2,5 единицы, а при использовании варианта г) – 6,9 единиц.
5.2.1. Первая секция. В таблице 4 представлены предельные осевые усилия, возникающие в приводе первой штанги первой секции манипулятора. Таблица показывает, что при массе схвата ![]() максимальные усилия в приводе штанги варьируются от 576 Н до 1204 Н; в варианте настроек регуляторов а) эти усилия в 6.7 раза превышают такие же усилия в односекционном манипуляторе, а в варианте г) - в 8.9 раза.
максимальные усилия в приводе штанги варьируются от 576 Н до 1204 Н; в варианте настроек регуляторов а) эти усилия в 6.7 раза превышают такие же усилия в односекционном манипуляторе, а в варианте г) - в 8.9 раза.
Аналогичные результаты для привода второй штанги первой секции трехсекционного манипулятора представлены в таблице 5.
Таблица 4 – Предельные осевые усилия в приводе первой штанги первой секции трехсекционного манипулятора
Вариант настроек | Усилие | ||||
|
|
|
|
| |
а) | 576; -55 | 1593; -145 | 2610; -235 | 3627; -325 | 4644; -415 |
г) | 1204; -127 | 3603; -353 | 6003; -579 | 8388; -8056 | 10770; -1031 |
Таблица 5 – Предельные осевые усилия в приводе второй штанги первой секции манипулятора
Вариант настроек | Усилие | ||||
|
|
|
|
| |
а) | 37; -624 | 51; -1598 | 83; -2572 | 114; -3547 | 146; -4522 |
г) | 81; -1301 | 170; -3631 | 268; -5952 | 367; -8291 | 465; -10618 |
Таблицы 4, 5 иллюстрируют рисунки 28, 29.

Рисунок 28 – Зависимость максимального осевого усилия в приводах первой секции трехсекционного манипулятора от массы схвата

Рисунок 29 – Зависимость минимальных осевых усилий в приводах первой секции от массы схвата
Отметим, что предельные осевые усилия, возникающие в приводе третьей штанги первой секции манипулятора, не представлены потому, что эти усилия меньше по модулю рассмотренных усилий в приводах первой и второй штанг.
Из рисунков 28, 29 следует, что имеет место практически линейная зависимость предельных осевых усилий в приводах первой секции манипулятора от массы схвата (таблица 6).
Наличие сил трения в шарнирах манипулятора приводит к появлению в приводах также радиальных усилий. Исследование показывает, что максимальные радиальные усилия имеют место в приводе третьей штанги первой секции. При изменении массы схвата в диапазоне от 0 до 20 кг эти усилия практически не зависят от этой массы и для варианта а) настроек регуляторов равны 21 Н, а для варианта г) – 36 Н.
Таблица 6 – Линейные аппроксимации предельных осевых усилий в приводах первой секции манипулятора
Вариант настроек регуляторов |
|
|
а) |
|
|
г) |
|
|
5.2.2. Вторая секция. В данной секции максимальные по модулю осевые усилия возникают в приводах второй и третьей штанг (таблицы 7, 8).
Таблица 7 – Предельные осевые усилия в приводе второй штанги второй секции трехсекционного манипулятора
Вариант настроек | Усилие | ||||
|
|
|
|
| |
а) | 532; -122 | 1320; -307 | 2188; -493 | 3056; -677 | 3924; -864 |
г) | 1091; -123 | 3170; -310 | 5348; -498 | 7497; -686 | 9681; -874 |
Таблица 8 – Предельные осевые усилия в приводе третьей штанги второй секции трехсекционного манипулятора
Вариант настроек | Усилие | ||||
|
|
|
|
| |
а) | 102; -416 | 282; -1193 | 463; -2014 | 642; -2835 | 832; -3655 |
г) | 103; -877 | 283; -2868 | 463; -4885 | 646; -6903 | 837; -8920 |
Таблицы 7, 8 иллюстрируют рисунки 30, 31, которые показывают, что зависимости предельных осевых усилий в приводах второй секции манипулятора от массы схвата хорошо приближаются линейными функциями (таблица 9).

Рисунок 30 – Зависимость максимального осевого усилия в приводах второй секции трехсекционного манипулятора от массы схвата
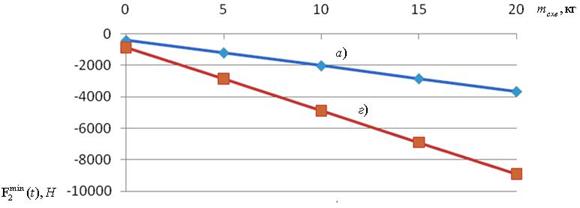
Рисунок 31 – Зависимость минимального осевого усилия в приводах второй секции трехсекционного манипулятора от массы схвата
Таблица 9 – Линейные аппроксимации предельных осевых усилий в приводах второй секции манипулятора
Вариант настроек регуляторов |
|
|
а) |
|
|
г) |
|
|
Максимальные радиальные усилия в данном случае также имеют место в приводе третьей штанги. Как и для первой секции, эти усилия практически не зависят от массы схвата и для варианта а) настроек регуляторов составляют 26 Н, а для варианта г) – 45 Н.
5.2.3. Третья секция. В данной секции максимальные по модулю осевые усилия возникают, как и в первой секции, в приводах первой и второй штанг (таблицы 10, 11, рисунки 32, 33).
Таблица 10 – Предельные осевые усилия в приводе первой штанги третьей секции трехсекционного манипулятора
Вариант настроек | Усилие | ||||
|
|
|
|
| |
а) | 74; -19 | 359; -104 | 649; -200 | 940; -297 | 1230; -394 |
г) | 153; -29 | 821; -146 | 1489; -266 | 2157; -385 | 2826; -505 |
Таблица 11 – Предельные осевые усилия в приводе второй штанги третьей секции трехсекционного манипулятора
Вариант настроек | Усилие | ||||
|
|
|
|
| |
а) | 30; -92 | 136; 427 | 257; -765 | 377; -1104 | 498; -1442 |
г) | 29; -198 | 139; -982 | 265; -1767 | 392; -2551 | 520; -3327 |

Рисунок 32 – Зависимость максимального осевого усилия в приводах третьей секции трехсекционного манипулятора от массы схвата
Аппроксимация зависимостей предельных осевых усилий в приводах третьей секции манипулятора от массы схвата линейными функциями приведена в таблице 12.
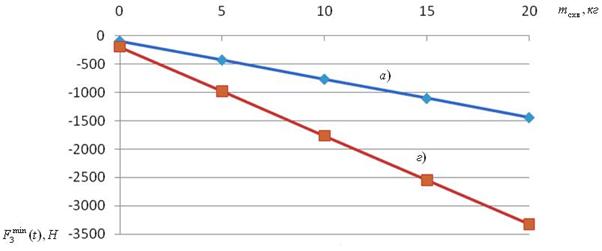
Рисунок 33 – Зависимость минимального осевого усилия в приводах третьей секции трехсекционного манипулятора от массы схвата
Таблица 12 – Линейные аппроксимации предельных осевых усилий в приводах третьей секции манипулятора
Вариант настроек регуляторов |
|
|
а) |
|
|
г) |
|
|
Максимальные радиальные усилия в приводах третьей секции манипулятора практически не зависят от массы схвата и для варианта а) настроек регуляторов равны примерно 6 Н, а для варианта г) – 10 Н.
Заключение
В работе созданы MatLab/Simulinkматематические модели односекционного и трехсекционного манипуляторов на основе механизма параллельной кинематики типа «гексапод», для управления приводами штанг которого используется двухконтурная системы управления на основе ПИД-регуляторов.
Для односекционного манипулятора разработаны его CATIA-модель, позволившая определить требуемые диапазоны изменения длин штанг манипулятора, а также иерархическая Simulink-модель. С помощью последней модели выполнено исследование осевых усилий в приводах, моментов в шарнирах, а также ускорения схвата. Кроме того, выполнено широкое исследование предельных осевых и радиальных усилий в приводах манипулятора.
Для трехсекционного манипулятора также разработана его CATIA-модель и иерархическая Simulink-модель. С помощью последней модели выполнено исследование осевых усилий в приводах каждой из секций манипулятора, а также исследование предельных осевых и радиальных усилий в этих приводах.
Результаты работы могут быть использованы при проектировании рассматриваемых манипуляторов.
Работа выполнена в рамках аналитической ведомственной целевой программы «Развитие потенциала высшей школы (2009 – 2010 годы)», проект 2.1.2/1509.
Литература
1. Merlet J.P. Parallel Robots. Solid mechanics and its applications.- Kluwer Academic Publishers, V. 74, 2000.- 394 p.
2. Глазунов В.А. и др. Разработка манипуляционных механизмов с параллельно-перекрестной структурой // Проблемы машиностроения и надежности машин, 2008, ╧2, с. 90 – 100.
3. Волкоморов С.В., Каганов Ю.Т. Карпенко А.П. Моделирование и оптимизация некоторых параллельных механизмов // Информационные технологии, Приложение, 2010, ╧5, с. 1-32.
4. Каганов Ю.Т., Карпенко А.П. Математическое моделирование кинематики и динамики робота-манипулятора типа «хобот». 1. Математические модели секции манипулятора, как механизма параллельной кинематики типа «трипод» // Наука и образование: электронное научно- техническое издание, 2009,10. [Электронный ресурс] /(http://technomag.edu.ru/doc/133262.html).
5. Каганов Ю.Т., Карпенко А.П. Математическое моделирование кинематики и динамики робота-манипулятора типа «хобот». 2. Математические модели секции манипулятора, как механизма параллельной кинематики типа «гексапод» // Наука и образование: электронное научно- техническое издание, 2009, 11. [Электронный ресурс] /(http://technomag.edu.ru/doc/133731.html).
6. Колесов Ю.Б., Сениченков Ю.Б. Имитационное моделирование сложных динамических систем [Электронный ресурс] / (http://www.exponenta.ru/soft/others/mvs/ds_sim.asp).
7. Махов, А.А. Моделирование механических систем с помощью пакета расширения SimMechanics [Электронный ресурс] / (http://exponenta.ru/educat/systemat/mahov/simmechanics.asp).
8. Мартынюк, В.А. CATIA. Начало работы [Электронный ресурс] / (http://bigor.bmstu.ru/).
Публикации с ключевыми словами: робот-манипулятор
Публикации со словами: робот-манипулятор
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||