научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК: №534.1:674.05
МГТУ им. Н. Э. Баумана
vladimir.prokopov@gmail.com.
В свете решения актуальной задачи разработки новых технических решений в области создания деревообрабатывающих станков, сохраняющих преимущества и исключающих недостатки существующего парка оборудования предложен [1, 2] принципиально новый класс деревообрабатывающего оборудования – многопильный станок с круговым поступательным движением полосовых пильных полотен (Рис. 1).
а) |
б) |
Рис. 1 а) опытный образец многопильного станка «Шершень М2001» с круговым поступательным движением полосовых пильных полотен и б) принципиальная схема многопильного станка | |

Станок обладает высокими функциональными характеристиками, среди которых следует особо выделить: улучшение качества обработанных поверхностей, снижение энергопотребления; относительно малый вес и динамическую сбалансированность основных узлов; повышенную мобильность оборудования. Особенностью данного оборудования является передача движения с ведущего на ведомый вал непосредственно через пильные полотна.
Все попытки создания аналогичного оборудования опытно-эмпирическим путем окончились неудачей [3, 4]. Во время тестовой эксплуатации опытно-промышленных образцов, как правило, возникали режимы работы, сопровождавшиеся поперечным изгибом и скручиванием полотен, что приводило к формированию криволинейных пропилов, излому зубьев, задиру обрабатываемых поверхностей и, в ряде случаев, разрушению пильных полотен. Данные режимы наблюдались как при распиловке древесины, так и на холостом ходу. Причины возникновения подобных режимов объясняются сложным динамическим поведением системы, возможностью появления, при определенных условиях, как обычных, так и параметрических резонансов, а также существенной нелинейностью ее отдельных элементов (конструкция, близкая по схеме исследуемой, рассматривается в работах Зеемана Е.К. и Арнольда В.И. [5]). В доступной автору литературе, в силу новизны конструкции, не удалось найти приемлемую методику позволяющую провести всестороннее исследование данной задачи.
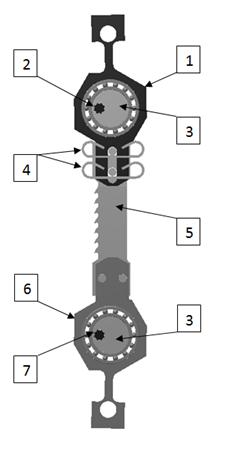
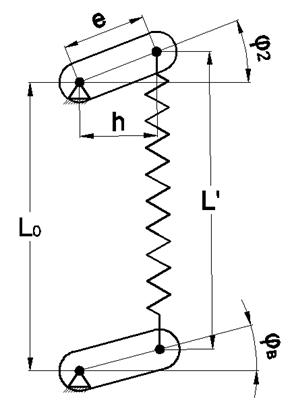
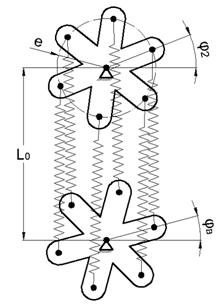
Устройство пильного модуля, состоящего из участков ведущего и ведомого валов с эксцентриками, подшипников, корпусных деталей, пильного полотна и упругих элементов крепления представлено на рис. 2. Обозначения на схеме: L0 – расстояние между осями валов, ![]() – расстояние между осями вращения корпусных деталей, e – эксцентриситет оси вращения корпусной детали, h - расстояние от центра вращения верхнего вала до линии действия упругой силы, возникающей при деформировании приведённого упругого элемента на
– расстояние между осями вращения корпусных деталей, e – эксцентриситет оси вращения корпусной детали, h - расстояние от центра вращения верхнего вала до линии действия упругой силы, возникающей при деформировании приведённого упругого элемента на ![]() . Сбалансированность модуля позволяет рассматривать упрощённую систему, заменяя пильное полотно с упругими элементами крепления на не обладающие массой упругие связи. Данная система имеет две степени свободы:
. Сбалансированность модуля позволяет рассматривать упрощённую систему, заменяя пильное полотно с упругими элементами крепления на не обладающие массой упругие связи. Данная система имеет две степени свободы: ![]() – угол поворота нижнего (ведущего) вала и
– угол поворота нижнего (ведущего) вала и ![]() – угол поворота верхнего (ведомого) вала. Изменение длины упругой связи, возникающее при взаимном повороте звеньев:
– угол поворота верхнего (ведомого) вала. Изменение длины упругой связи, возникающее при взаимном повороте звеньев:


Расстояние от центра вращения верхнего звена до линии действия упругой силы, возникающей при деформировании упругой связи на ![]() :
:

Уравнение движения пильного модуля для принятой расчётной схемы (рис. 2):
| (3) |
где K – приведённая жёсткость упругой связи (определяется как жёсткость последовательно установленных пильного полотна и упругих элементов крепления, жёсткость которых определяется численно [6]), I – момент инерции участка верхнего вала с эксцентриком, ![]() - коэффициент демпфирования. В данной системе, обладающей сильной нелинейностью могут возникать неустойчивые режимы движения. Для исследования устойчивости параметрических колебаний применим метод Флоке-Ляпунова [7, 8] к линеаризованной системе (4).
- коэффициент демпфирования. В данной системе, обладающей сильной нелинейностью могут возникать неустойчивые режимы движения. Для исследования устойчивости параметрических колебаний применим метод Флоке-Ляпунова [7, 8] к линеаризованной системе (4).
где ![]() – угол поворота ведущего (нижнего) вала,
– угол поворота ведущего (нижнего) вала, ![]() – угловая скорость вращения ведущего вала. Диаграммы неустойчивости параметрических колебаний приведены на рис 3.
– угловая скорость вращения ведущего вала. Диаграммы неустойчивости параметрических колебаний приведены на рис 3.
а) |
б) |
Рис. 3 Диаграммы неустойчивости параметрических колебаний, описываемых уравнением (4) в осях | |
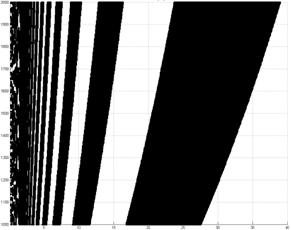
При увеличении скорости вращения ведущего звена (соответствует движению по горизонтали изображающей точки на диаграмме) будет происходить чередование устойчивых и неустойчивых режимов движения.
С учётом гипотезы об абсолютной жёсткости валов уравнение движения для системы с шестью пильными модулями запишется в виде:


где ![]() - суммарный момент инерции верхнего (ведомого) вала с установленными эксцентриками, K - приведённая жёсткость полотна и упругих элементов в пильном модуле. Линеаризованное уравнение движения (6) системы (рис. 4) не содержит угла поворота ведущего звена и описывает колебания ведомого звена по гармоническому закону с частотой
- суммарный момент инерции верхнего (ведомого) вала с установленными эксцентриками, K - приведённая жёсткость полотна и упругих элементов в пильном модуле. Линеаризованное уравнение движения (6) системы (рис. 4) не содержит угла поворота ведущего звена и описывает колебания ведомого звена по гармоническому закону с частотой ![]() .
.
| (6) |
Дополнительный анализ нелинейного уравнения (5) методами отображений и спектрального анализа реализаций [7, 8], показывает, что для системы (рис. 4) характерны колебания на одной частоте ![]() , не зависящей от скорости вращения ведущего звена. Надо сказать, что наличие 3х и более упругих связей между валами (при условии равномерного углового расположения эксцентриков на валах) приводит к исчезновению зависимости от угла поворота ведущего вала. И в этом случае для системы с N>2 связями можно записать выражение для частоты колебаний:
, не зависящей от скорости вращения ведущего звена. Надо сказать, что наличие 3х и более упругих связей между валами (при условии равномерного углового расположения эксцентриков на валах) приводит к исчезновению зависимости от угла поворота ведущего вала. И в этом случае для системы с N>2 связями можно записать выражение для частоты колебаний:
| (7) |
Использование полученных результатов на этапе проектирования дереворежущего оборудования нового типа позволит исключить возникновение резонансных режимов движения и обеспечит безопасную работу оборудования.
Литература
- Блохин М. А. Расчёт и проектирование многопильного станка с круговым поступательным движением полосовых пильных полотен: Дис. на соиск. уч. ст. канд. техн. наук. Москва, 2005.151 с.
2. Патент №2131806 РФ, 6 В27 В 3/00. Пильный модуль, пильный блок и устройство для распиловки. / М.А. Блохин. - №98106906/13; Заявл. 20.04.98; Опубл. 20.06.99; Бюл. №4
3. А.С. 370026 СССР, МКИ В27В3/00. Лесопильная рама / Р.В. Дерягин, В.В. Зязин, В.И. Шишигин. - №1711986/29-33; Заявл. 09.11.71; Опубл. 1973, Бюл. №11.
4. Патент №3929048 США, В27В 3/00. Многорядная пила с возвратно-поступательным движением полотна. / John W. McGehee. - №522546; Заявл. 11.11.74; Опубл. 30.12.75
5. Арнольд В. И. Теория катастроф. 3-е изд., доп. М.: Наука, 1990. 128 с.
6. Гаврюшин С. С., Барышникова О. О., Борискин О. Ф. Численные методы в проектировании гибких упругих элементов. Калуга 2001. 198 с.
7. Бутенин Н. В., Неймарк Ю. И., Фуфаев Н. Л. Введение в теорию нелинейных колебаний. М.: Наука, 1985. 385 с.
8. Старжинский В. М. Прикладные методы нелинейных колебаний. М.: Наука, 1977. 256 с.
Публикации с ключевыми словами: динамика, колебания, лесопильное оборудование, деревообработка, многопильный станок, коленчатый станок, нелинейные колебания, устойчивость параметрических колебаний
Публикации со словами: динамика, колебания, лесопильное оборудование, деревообработка, многопильный станок, коленчатый станок, нелинейные колебания, устойчивость параметрических колебаний
Смотри также:
- Анализ лесопильного станка с использованием виртуальной параметрической модели
- Анализ нелинейных колебаний математического маятника с использованием пакета Mathematica
- Анализ конструктивных и технологических параметров устройства ротационного ленточного охватывающего шлифования на основе исследований динамики относительного движения абразивной ленты
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||