научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2012
DOI: 10.7463/0912.0434696
Россия, МГТУ имени Н.Э. Баумана
Введение
Для развития микро- и нанотехнологий во многих наукоёмких областях производства необходимо создание устройств перемещения и активной виброизоляции механизмов с чрезвычайно жесткими требованиями к точностным и динамическим параметрам [1]. К прецизионному оборудованию, в котором используются указанные устройства, относится оборудование для изготовления последних поколений сверхбольших интегральных микросхем (СБИС), микроэлектромеханических систем (МЭМС), нанотехнологические комплексы локальной обработки изделий сфокусированными ионными пучками, сканирующие зондовые микроскопы (СЗМ), оборудование для адаптивной оптики, установки для локальной лазерной обработки, оборудование для механической обработки заготовок с высокой точностью и др.
1 Актуальность работы
В 1998 году денежный объем мирового производства в электронной промышленности превысил объем производства автомобильной промышленности, и к 2010 г. ожидалось, что ее объем достигнет 4,5 % мирового валового продукта (свыше 1 триллиона долларов США) [2]. Полупроводниковая промышленность демонстрирует еще большие темпы роста. Эмпирический закон Мура (или его вариации) устанавливает, что наиболее экономически выгодное число транзисторов на интегральной схеме удваивается каждые 18-24 месяца. Закон Мура, по сути, отражает экспоненциальный рост технологических возможностей производства электронных приборов.
Основой большинства современных электронных устройств являются интегральные микросхемы и печатные платы. Наиболее жесткие технологические требования предъявляют интегральные схемы, минимальный размер элемента на которых уже к 2009 году достиг 38 нм, а к 2010 году составил 32 нм [3]. Для изготовления интегральных схем и печатных плат применяется технология микролитографии, к которой сейчас наиболее применим термин «нанолитография» [4]. Одним из основных этапов технологии микролитографии является процесс экспонирования заготовки излучением определенной длины волны.
В процессе экспонирования заготовки с нанесенным слоем резиста необходимо точно совместить подложку и фотошаблон по реперным знакам. Для обеспечения заданного допуска на размер элемента система позиционирования должна обеспечивать совмещение подложки и шаблона с точностью ~0.10-0.15 от допуска на размер. Таким образом, при размере элемента 32 нм и допуске на него 3 нм, точность позиционирования не должна превышать ~0,3 нм [5].
Одним из основных направлений развития современной астрофизики является создание сверхбольшого оптического телескопа (диаметр главного зеркала более 20 м), использование средств адаптивной оптики для реализации качественных предельных характеристик оптических инструментов, апертурного синтеза, автоматизированных средств обработки изображений и.т.д. Главной тенденцией развития наземного телескопостроения всегда было стремление увеличить проницающую способность телескопа. Реальным способом решения данной проблемы является повышение качества получаемого изображения (уменьшение углового размера изображения в реальных условиях действия искажающих факторов) и увеличения диаметра главного зеркала [6]. Наиболее эффективный метод борьбы с влиянием искажающих факторов на качество изображения в телескопе является их минимизация (путем выбора места установки телескопа, выбором рациональной оптической схемы, созданием материалов, новых технологий, совершенствованием конструкции, разгрузкой зеркал, выбором монтировки), а затем – адаптивная компенсация оставшихся искажений. Поскольку технологические возможности изготовления оптических зеркал ограничены размером до 6-7 метров, то увеличение диаметра главного зеркала может быть осуществлено следующими способами: созданием крупногабаритных астрономических комплексов с многозеркальными телескопами (MMT, VLT, LBT и др.) или созданием телескопов с составным главным зеркалом (СГЗ) (HET, SALT, GMT, АСТ и др.) [7]. Для управления СГЗ юстировочные приводы каждого элементарного зеркала (ЭЗ) должны отвечать чрезвычайно высоким требованиям по точности позиционирования (погрешность не более 50 нм), по быстродействию (постоянная времени привода не более 100 мс) и нагрузочной способности (масса перемещаемого объекта – до 100 кг), что обусловлено необходимостью многократных перемещений и точных позиционирований в процессе функционирования телескопа.
Все вышесказанное приводит к необходимости применения систем точного позиционирования в указанных и еще ряде областей: позиционирование зонда сканирующего зондового микроскопа [8], для позиционирования образца в установках нанолокальной обработки [9], при настройке оптоволоконных систем [10].
При работе прецизионного оборудования вибрации в производственном помещении оказывают отрицательное влияние на характеристики оборудования [11].
Для улучшения характеристик оборудования необходимо осуществлять его вибрационную защиту. Существует ряд методов вибрационной защиты [12]. Наиболее эффективным и методом вибрационной защиты является виброизоляция, которая подразделяется на пассивную, активную и полуактивную. Виброизоляция сводится к уменьшению связей между источником и объектом, при этом происходит уменьшение динамического воздействия вибрации на объект [13]. Примером систем пассивной виброизоляции служат массивные основания оборудования или тяжелые гранитные плиты. Однако, эти системы эффективно защищают от вибраций больших частот и малых амплитуд. Системы же активной виброизоляции наиболее эффективны на малых частотах и больших амплитудах вибраций. Системы активной виброизоляции компенсируют дополнительным источником энергии возмущающие силы, вызывающие вибрацию защищаемого объекта, или относительное смещений объекта (виброперемещения). Для этих систем обычно применяют механизмы, компенсирующие виброперемещения за счет замкнутой системы управления. Причем, они должны обладать малой погрешностью позиционирования, т.к. повышение погрешности системы виброизоляции приводит к ухудшению характеристик оборудования.
Очевидно, что для эффективного гашения спектра частот вибраций, характерных для производственных помещений и исследовательских лабораторий [11] 0,2…200 Гц при виброперемещениях до 500 мкм [14] необходимо совмещать системы пассивной и активной виброизоляции.
2 Обзор и анализ механизмов перемещения и виброизоляции
В качестве механизма для активной виброизоляции или перемещения объектов в приведенных областях могут быть потенциально применены: гидравлические, пневматические, электромеханические, пьезоэлектрические, магнитострикционные и др. механизмы и приводы на их основе [15, 16].
Одним из них является гидравлический привод с ньютоновской жидкостью в качестве рабочего тела. Существенным недостатком данной системы является наличие большой постоянной времени (более 500 мс) и высокой погрешности перемещения объекта (более 1 мкм), что связано с наличием инерционных звеньев (мембран, клапанов, распределителей и т.п.) в конструкции механизма [17]. Несомненными достоинствами механизма являются высокая нагрузочная способность и возможность обеспечения пассивной виброизоляции за счет упругих свойств рабочей жидкости. Характерным примером гидравлической системы полуактивной виброизоляции является автомобильный амортизатор. Пневматический привод схож по принципу действия с гидравлическим приводом [18]. К его недостаткам дополнительно относится еще более низкая точность, которая связана с существенно большей сжимаемостью рабочей среды [16].
Наиболее характерным примером электромеханического механизма является привод на основе шарико-винтовой пары и его различных вариаций. За счет наличия длинных кинематических цепей от источника движения к объекту и наличия зазоров в кинематических парах этот механизм обладает высокой постоянной времени (более 500 мс) и высокой погрешностью перемещений (более 1 мкм). Для снижения погрешности перемещений (до 10-20 нм) возможно [19] применение магнитной и пневматической подвески ходового винта механизма.
Пьезоэлектрический привод осуществляет перемещение за счет обратного пьезоэлектрического эффекта. Для этого применяются специальные материалы, обладающие пьезоэлектрическими свойствами [16]. Данные механизмы обладают чрезвычайно низкой погрешностью позиционирования (до 0,1 нм) при достаточно высоком диапазоне перемещений (до 100 мм) и малой постоянной времени до 1 мс (по данным кампании Physik Instrumente GmbH & Co. KG (Германия)). Данные механизмы обладают низкой нагрузочной способностью, ограниченной прочностными свойствами пьезоэлектрического материала (обычно керамики), а пьезоэлектрический эффект сильно зависит от температуры. Магнитострикционный механизм [20] по характеристикам схож с пьезоэлектрическим. Рабочим телом является магнитострикционный материал (Терфенол-Д), который способен менять форму и размеры под действием магнитного поля. Применение электромагнитных катушек приводит к снижению быстродействие механизма (50 мс). Магнитострикционные и пьезоэлектрические механизмы способны обеспечить качественную активную виброизоляцию объектов небольшой массы (до 10 кг) на широком диапазоне частот 1-200 Гц.
Задача совмещения систем активной и пассивной виброизоляции может быть успешно решена также за счет применения магнитореологических (МР) устройств перемещений, использующих способность рабочей среды практически мгновенно менять динамическую вязкость, модуль упругости, деформацию и другие характеристики под действием магнитных полей. Такое быстрое обратимое изменение характеристик называется МР эффектом. В качестве вязких реологических сред в устройствах могут использоваться МР жидкости (МРЖ) – суспензии на основе маслянистых жидкостей (например, полиэтилсилоксановая жидкость) и магнитных микрочастиц (Cr02, Fe203) размером 10-30 мкм с добавлением поверхностно-активных веществ (ПАВ), уменьшающих скорость расслоения суспензии. МРЖ относятся к классу так называемых «умных» («smart») материалов, свойства которых изменяются под воздействием магнитных и сдвиговых полей [21].
Изменяя магнитное поле в объеме, где протекает жидкость, можно напрямую регулировать динамическую вязкость рабочей МРЖ и управлять её течением без использования регуляторов с подвижными механическими элементами (золотниками, заслонками, мембранами и т.д.) Таким образом, этот эффект может быть применен для управления перемещением и демпфированием. За счет исключения из конструкции устройства подвижных управляющих инерционных элементов с внешним трением можно существенно повысить точность (50-100 нм) и быстродействие (постоянная времени до 100 мс) микро- и нанопозиционирования. Также механизмы обладают всеми преимуществами гидравлического привода и могут обеспечить качественную пассивную и активную виброизоляцию.
Устройства на основе МР эффекта в настоящее время широко применяются для полуактивной виброизоляции объектов (United States Patent US 6,637,556 B1 L.Saiman (US)), чаще всего, это управляемые амортизаторы автомобилей (United States Patent US 6,953,108 E.N.Anderfaas (US) et al.). Широко известно применение МР механизмов для передачи крутящего момента в магнитожидкостных муфтах (UnitedStatesPatent US 6,932,204 J.P.Dolan (US)).
Применение МР эффекта в гидравлических приводах предложено В.И. Кордонским (UnitedStatesPatentUS5,452,745 W.I.Kordonskyetal.), а для регулировки подачи жидкости в гидроцилинды привода был применен МРД с кольцевым зазором. Данный привод обеспечивал смену направления перемещения с частотой до 250 Гц, что показывает потенциальную возможность применения подобных механизмов для виброизоляции оборудования в широком диапазоне частот 0,2…200 Гц.
3 Описание МР устройства для перемещения и активной виброизоляции
Предлагаемый в работе гидравлический модуль с МР управлением (МР модуль) для позиционирования и активной виброизоляции (патент №2443911 Рос.Федерация Михайлов В.П., Борин Д.Ю., Базиненков А.М., Акимов И.Ю.) обладает увеличенным диапазоном перемещений объекта (до 10 мм), что позволяет обеспечивать дополнительно защиту от нерегулярных вибраций малой частоты большой амплитуды (ударов).
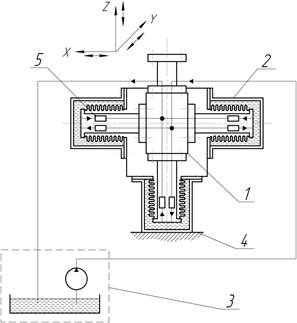
Гидравлический модуль на основе МРЖ (рис. 1) содержит пять гидроцилиндров 2 (на схеме показаны два горизонтальных гидроцилиндра из четырех и один – вертикальный), герметизированных сильфонами, подвижную платформу 1, с закрепленными на ней штоками, неподвижный корпус 4, входные и выходные МР дроссели (МРД) 5, расположенные попарно в каждом гидроцилиндре, гидравлическую насосную станцию 3. МРД работают по гидравлической мостовой схеме и включаются в каждой паре гидроцилиндров попарно. Рабочая МРЖ подается при помощи гидравлической насосной станции 3 параллельно во все гидроцилиндры 2 через входные МРД 5 и далее перемещается в сливной бак через выходные МРД 5. При подаче управляющих сигналов на электромагнитные катушки входных и выходных МРД 5 меняется динамическая вязкость МРЖ в их рабочих зазорах и в парах гидроцилиндров создается определенная разность давлений. Под действием этой разности давлений в гидроцилиндрах возникает движущая гидравлическая сила, перемещающая подвижную платформу 1 по соответствующей линейной координате X, Yили Z.
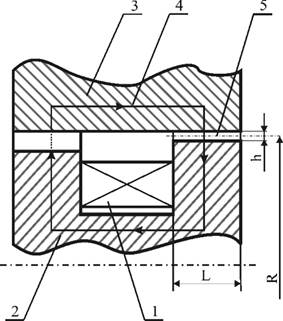
Рассмотрим главный исполнительный элемент устройства – МРД. Схема МРД с кольцевым рабочим зазором приведена на рис. 2. Дроссель состоит из электромагнитной катушки 1, корпуса 2 и сердечника 3 из магнитомягкой стали, которые выполняют функции магнитопровода. Между корпусом 2 и сердечником 3 сформирован рабочий зазор 5, через который протекает МРЖ. Подача электрического тока на обмотку катушки 1 вызывает появление магнитного поля и соответственно магнитного потока 4 через магнитопровод. Магнитный поток 4 воздействует на протекающую через рабочий зазор 5 МРЖ и увеличивает ее динамическую вязкость, влияя на ее расход через зазор и падение давления в нем.
|
|
Рис. 1. Схема устройства для перемещения и активного демпфирования на основе МРЖ | Рис. 2. Схема МРД с кольцевым рабочим зазором |
Очевидно, что характеристики МР устройства (быстродействие и точность) существенно зависят от свойств рабочей МРЖ. В настоящее время не существует единой модели, описывающей поведение жидкости в зазоре МРД. Изменение параметров концентрации и материалов компонентов МРЖ приводит к изменению не только количественных значений параметров течения жидкости но и качественный закон (модель) ее поведения [22]. Поэтому для обеспечения качественного управления МР устройствами необходимо определение зависимости характеристик МРЖ от управляющих сигналов и степень их влияния на параметры механизма.
4 Исследование электрического сопротивления МР жидкости
Быстродействие МР модуля зависит от скорости срабатывания его основного управляющего элемента. Время срабатывания МРД определяется временем нарастания магнитного потока в магнитопроводе и рабочем зазоре, заполненном МРЖ [23].
 . (1)
. (1)
Здесь lm – длина магнитопровода;
d – диаметр магнитопровода;
𝜌 – удельное электрическое сопротивление МРЖ в рабочем зазоре;
𝛿 – величина эквивалентного зазора магнитопровода.
 . (2)
. (2)
Здесь h– величина рабочего зазора;
μmи μМРЖ – магнитная проницаемость материала магнитопровода и МРЖ соответственно.
Подставляя геометрические параметры магнитопровода исследуемого МРД lm = 0,17 м, d = 1,8×10-2 м, h = 2×10-4 м, а также магнитную проницаемость материала магнитопровода (Сталь 20) μm = 3,2×103 и МРЖ μМРЖ = 4,8, получаем ![]() 2,2×103/𝜌 .
2,2×103/𝜌 .
Таким образом, из полученной формулы видно, что удельное электрическое сопротивление МРЖ обратно пропорционально постоянной времени МРД и существенно влияет на быстродействие МР модуля. Ранее [24] выявлено существенное влияние концентрации дисперсной фазы в МРЖ на ее электрическое сопротивление, а также определены временное изменение сопротивления МРЖ при фиксированной величине магнитного поля.
Целью эксперимента было определение зависимости электрического сопротивления МРЖ от токового управляющего сигнала на электромагнитную катушку МРД, а также от времени подачи сигнала.
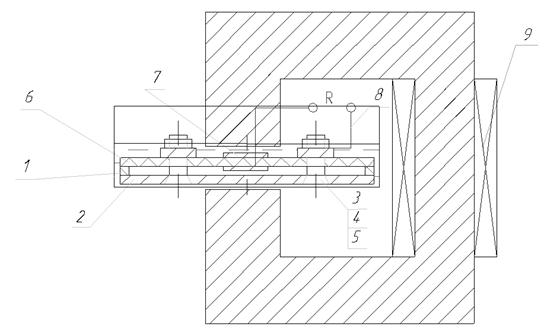
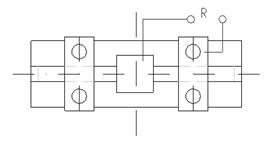
Для проведения экспериментов по исследованию электрической проводимости МРЖ была спроектирована и сконструирована оснастка (рис. 3).
Оснастка состоит из двух пластин 2 и 6, между которыми находится МРЖ, сопротивление которой измеряется. Заданная величина зазора обеспечивается калиброванной прокладкой 1. Электрический ток подводится к пластинам с помощью контакта 7 и проводов 8. Магнитная индукция в зазоре с МРЖ создается за счет электромагнитной катушки 9. Величина зазора между пластиной 2 и контактом 7 устанавливается щупом калиброванным. Этот зазор равен l = 1 мм. Объемная концентрация дисперсной фазы, частиц Fe2O3 игольчатой формы и размером 10-30 мкм, равна – 𝜑v = 0,5. При фиксированном значении рабочего зазора и концентрации ферромагнитного наполнителя проводится измерение зависимости сопротивления МРЖ от времени при подаче тока I = 0,5 А; 1,0 А на катушку индуктивности.
|
|
Рис. 3. Схема экспериментальной оснастки для исследования электрического сопротивления МРЖ: 1 – прокладка калиброванная; 2 – пластина; 3 – винт; 4 – гайка; 5 – шайба; 6 – пластина упругая; 7 – контакт; 8 – электропровод; 9 – катушка индуктивности | |
В результате экспериментальных исследований установлено, что после подачи магнитного поля электрическое сопротивление МРЖ падает, что связано с возникновением МР эффекта. В рабочем зазоре частицы Fe2O3 намагничиваются и образуют цепочки в направлении вектора магнитной индукции (перпендикулярно стенкам зазора поз. 2 и 6 рис. 3), которые и приводят к уменьшению электрического сопротивления зазора.
При подаче управляющего тока 0,5 А сопротивление падает на 30 % от номинала (200 МОм) и в 1,5 раза сопротивление уменьшается при управляющем токе в 1,0 А. падение сопротивления происходит не ранее чем за 5 мин от момента подачи тока. Очевидно, что для избегания существенного влияния электрического сопротивления МРЖ необходимо ограничивать однократное управляющее воздействие на МРД 2 мин. (рис. 4).
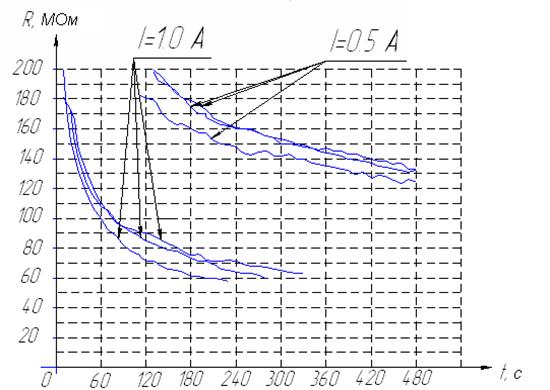
Рис. 4. Результаты экспериментов по исследованию электрического сопротивления МРЖ
5 Исследование объемного модуля упругости МРЖ
Жесткость кинематической цепи и быстродействие МР устройств прецизионных перемещений и активной виброизоляции в большой степени зависят от сжимаемости рабочей среды, которая определяется объемным модулем упругости МРЖ.
Ранее показано [25], что механические модели поведения МРЖ (модель Максвелла и Кельвина-Фогта) определяют время образования структур из частиц МРЖ в рабочем зазоре МРД как соотношения динамической вязкости среды к модулю упругости. Таким образом, быстродействие МРД и МР модуля можно регулировать за счет подбора параметров управления, зная изменение объемного модуля упругости под действием магнитного поля.
Для проведения исследований объемного модуля упругости МРЖ разработана оснастка (рис. 5). Оснастка состоит из электромагнитной катушки 1, магнитопровода, включающего два диска 4, сердечник 5, цилиндрический зазор с МРЖ 2, а также измерительную бюретку 3 для определения изменения уровня МРЖ при подаче давления Р от компрессора.
Для определения модуля упругости проводились измерения уровня жидкости в зависимости от двух факторов: давления от компрессора в диапазоне от 1·105 до 2·105 Па и управляющего тока на катушке от 0 до 1 А. Варьируя один из параметров необходимо было стабилизировать другой.
Объемный модуль упругости определяется по формуле [26].
 . (3)
. (3)
Здесь ΔР – приращение давления в бюретке 3 (рис. 5);
ΔV – уменьшение объема в бюретке 3;
V– объем МРЖ в цилиндрическом зазоре 2.
|
Рис. 5. Экспериментальная оснастка для исследования объемного модуля упругости |

Экспериментальные исследования объемного модуля упругости МРЖ показали (рис. 6, 7), что растворенные в МРЖ газы могут оказывать существенное влияние на их механические свойства. Однако при уменьшении давление в жидкости газы выделяются из МРЖ в виде пузырьков, ухудшая при этом ее свойства (уменьшают модуль упругости, вызывают пенообразование, кавитацию и т.д.).
Относительное количество газа, который может раствориться в жидкости до ее насыщения, прямо пропорционально давлению на поверхности раздела «газ-жидкость». Коэффициент растворимости воздуха, например, в минеральном масле при комнатной температуре равен примерно 0,1, т.е. в жидкости воздух растворяется в объеме, равном примерно 10 % от объема масла на одну атмосферу [26].
С увеличением температуры растворимость воздуха в масле сохраняется практически постоянной. Время, в течение которого происходит насыщение масла газом, зависит от величины поверхности раздела «газ-жидкость», приходящейся на единицу объема масла, а также от степени возмущенности состояния этой поверхности. При интенсивном перемешивании жидкость насыщается в течение нескольких минут, в спокойном состоянии процесс длится часами.
При уменьшении давления, как уже было сказано, происходит обратный процесс выделения газа из жидкости. Газ выделяется более интенсивно, чем растворяется и в циркулирующей жидкости процесс газовыделения протекает в течение нескольких секунд или даже их долей. Выделившийся газ находится в жидкости в виде пузырьков с диаметром до микронных размеров. Обычно в масле действующего гидропривода содержится примерно от 0,5 до 15 % воздуха в нерастворенном состоянии (в виде пузырьков) [26].
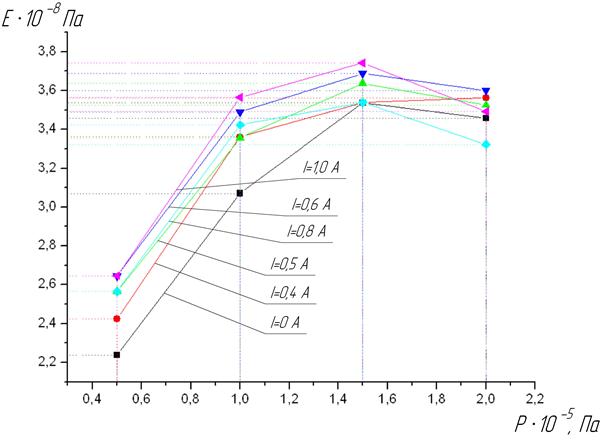
Рис. 6. Зависимости объемного модуля упругости МРЖ от давления при фиксированных значениях тока

Рис. 7. Зависимости объемного модуля упругости МР-жидкости от управляющего тока при фиксированных значениях давления
Экспериментальная оценка влияния магнитного поля на объемный модуль упругости показала, что если на МРЖ действует давление воздуха при различных фиксированных значениях управляющего тока, объемный модуль упругости жидкости сначала линейно возрастает, а, начиная с давления 105 Па, рост замедляется, и затем даже несколько снижается (рис. 7). Увеличение объемного модуля упругости связано с уменьшением количества и размера пузырьков воздуха. Некоторое снижение модуля упругости объясняется растворением воздуха, находящегося в пузырьках, в жидкости под действием повышенного давления.
При воздействии на МРЖ магнитного поля (управляющий ток увеличивается от 0 до 1 А, давление от 0,5×105 до 2,0×105 Па) происходит увеличение объемного модуля упругости от 8 до 18 % (рис. 7). Из графиков видно, что объемный модуль упругости увеличивается примерно на 18 % при увеличении тока для давления 0,5×105 Па и на 8 % для давления 1,5×105 Па. При давлении 2,0×105 Па увеличения модуля упругости практически не наблюдается. Разброс значений объемного модуля упругости связан с различными начальными условиями проведения эксперимента (различным количеством растворенного в жидкости воздуха, различной температурой окружающей среды и т.д.). Увеличение модуля упругости МРЖ происходит вследствие структурирования частиц дисперсной фазы вдоль силовых линий магнитного поля. При этом образуется структура, жесткость которой зависит от индукции магнитного поля.
Заключение
Результаты, полученные в ходе экспериментов, позволяют сделать следующие выводы.
1. Время срабатывания МРД определяется временем нарастания магнитного потока в магнитопроводе и рабочем зазоре, заполненном МРЖ. Длительность этого переходного процесса обратно пропорциональна удельному электрическому сопротивлению МРЖ в рабочем зазоре дросселя.
2. При воздействии внешнего магнитного поля на МРЖ ее электрическое сопротивление в направлении действия поля уменьшается при управляющем токе 0,5 А в течение шести минут примерно в 1,5 раза (от 180 МОм до 125 МОм), при управляющем токе 1,0 А в течение 4-5 минут примерно в три раза (от 180 МОм до 60 МОм). Уменьшение электрического сопротивления объясняется структурированием магнитных частиц вдоль силовых линий поля, образованием структуры из цепочек и уменьшением ширины контактных слоев между частицами.
3. С увеличением управляющего тока и, соответственно, с изменением внешнего магнитного поля, действующего на МРЖ, происходит увеличение объемного модуля упругости жидкости от 8 до 18 % вследствие структурирования частиц дисперсной фазы вдоль силовых линий магнитного поля. При этом образуется структура, жесткость которой зависит от индукции магнитного поля.
4. При фиксированном значении управляющего тока с ростом внешнего давления объемный модуль упругости МРЖ сначала линейно возрастает, а, начиная с давления около 1·105 Па, рост замедляется, и затем несколько снижается. Увеличение модуля упругости связано с уменьшением количества и размера пузырьков воздуха. Некоторое снижение модуля упругости объясняется растворением воздуха, находящегося в пузырьках, в жидкости под действием повышенного давления.
Работа выполнена при проведении НИР в рамках реализации ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009 – 2013 годы.
Список литературы
1. Михайлов В.П., Степанов Г.В., Базиненков А.М. и др. Магнитореологические устройства активной виброизоляции и позиционирования для нанотехнологического оборудования // Вестник МГТУ им. Н.Э.Баумана, серия "Приборостроение", специальный выпуск "Наноинженерия", - 2010, - С.138-148.
2. Sze S.M. Microelectronics Technology: Challenges in the 21st Century / Future Trends in Microelectronics. – New York: Wiley Interscience, 2002. – P. 3-16.
3. International Technology Roadmap for Semiconductros 2009 Edition: Lithography. – 30 p.
4. Per-Erik Hellstrom. Nanolithography – patterning techniques of fabrication of nano-scale devices // Docent Lecture 14th of February 2006. – эл. ресурс. – http://www.ict.kth.se/MAP/EKT/docs/HellstromDocentNanoLitho-graphy.pdf (12.02.2010).
5. Helbert J.N. Handbook of VLSI Microlithography: Principles, Tools, Technology and Applications — New York: William Andrew Publishing. – 2001. – 956 p.
6. Белкин Н.Д., Касперский В.Б., Сычев В.В. Большой астрономический телескоп России. Концепция создания // Оптический журнал. - 1994. - №3. - С.5-11.
7. Сычёв В.В. Адаптивные оптические системы в крупногабаритном телескопостроении: Монография. – Старый Оскол: ООО “ТНТ”, 2005. – 464с., ил.
8. Миронов В.Л. Основы сканирующей зондовой микроскопии // Учебное пособие для студентов старших курсов высших учебных заведений. – Нижний Новгород: РАН, Институт фзики микроструктур, 2004. – 110 с.
9. Тихомиров А.А. Основы сканирующей зондовой микроскопии и методы ее применения в современных научных исследованиях // Приложение к журналу «Вестник РГРТУ». – Рязань, №4, 2009. – с.61-66.
10. The Role of Precision Motion in Fiber-Optic Manufacturing, Alan Feinstein, Optics & Photonics News, August 2002.
11. Система виброизоляции прецизионного технологического оборудования. / Н.И. Камышный, М.В. Курчанова, П.В. Логинов // Известия вузов. Машиностроение. 1988. - №10 – С.150-155.
12. Вибрация – друг или враг. / К.В.Фролов. – М.: Изд-во Наука, 1984. - 141 c.
13. Вибрации в технике: Справочник в 6 томах. / Под ред. В.Н. Челомея. – М.: Машиностроение, 1981. – т.6. Защита от вибраций и ударов / Под ред. К.В. Фролова. 1981. – 456 с.
14. Голубева К.В. Оценка погрешностей при поверке геодезического оборудования при действии сторонних источников вибрации // Приволжский научный журнал – Нижний Новгород, 2011. - №4. С. 67 – 71.
15. R.G. Gilbertson, J.D. Busch A Survey of micro-actuator technologies for future spacecraft mission // The Journal of The British Interplanetary Society, 1996, Vol. 49. – pp. 129-138.
16. Механика и физика точных вакуумных механизмов: Моногр., В 2 т. / А.Т. Александрова, Н.С. Вагин, Н.В. Василенко и др.; Под ред. Е.А. Деулина. - М.: НПК “Интелвак”; Вакууммаш, 2002. - Т.2. - 152 с.
17. А.С. Наземцев Гидравлические и пневматические системы. Часть 2. Гидравлические приводы и системы // Учебное пособие – М.: ФОРУМ, 2004, 304 с.
18. А.С. Наземцев Гидравлические и пневматические системы. Часть 1. Пневматические приводы и средства автоматизации // Учебное пособие – М.: ФОРУМ, 2004, 240 с.
19. Shimokohbe A. The development of Nano-meter positioning technology in Japan // ICAMT’99: Proc. of conference. – Xi'an (China), 1999. – P. 83-87.
20. Vibration control of a beam using linear magnetostrictive actuators / Seok-Jun Moon, Chae-Wook Lim, Byung-Hyun Kim, Young-Jim Park. – Smart Structures and Materials 2005: Damping and Isolation. – Proceedings of SPIE Vol. 5760 (SPIE, Bellingham, WA, 2005).
21. Шульман З.П., Кордонский В.И. Магнитореологический эффект. – Минск: Наука и техника, 1982. – 184 с.
22. Bossis, G., O. Volkova, S. Lacis and A. Meunier, in “Ferrofluids,” Magnetorheology: Fluids, Structures and Rheology. S. Odenbach, ed., Springer, Berlin, 2002.
23. Коновалов Г.Ф., Коноваленко О.В. Системы автоматического управления с электромагнитными порошковыми муфтами. – М.: Машиностроение, 1976. – 156 с.
24. Electrical Conductivity of Magnetorheological Suspensions Based on Iron Microparticles and Mineral Oil in Alternative Magnetic Field / Bica I – Journal of Industrial and Engineering Chemistry. – №16(3) 2012. – pp. 359-363.
25. И.Ю. Акимов, А.М. Базиненков, В.П. Михайлов Системы активной виброизоляции реологического типа // Материалы XIII Международной научно-технической конференции «Высокие технологии в промышленности России». – Изд. ОАО ЦНИТИ «Техномаш», 2007. – с. 150-158.
26. Башта Т.М. Машиностроительная гидравлика. – М.: Машиностроение, 1971 – 672 с.
Публикации с ключевыми словами: модуль упругости, прецизионное оборудование, активная виброизоляция, магнитореологическая жидкость, электрическое сопротивление
Публикации со словами: модуль упругости, прецизионное оборудование, активная виброизоляция, магнитореологическая жидкость, электрическое сопротивление
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||