научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2012
DOI: 10.7463/1012.0479653
УДК. 629.78
РКК «Энергия» имени С.П. Королёва
Введение
Управление полётом – управление параметрами состояния космического аппарата (КА) (последовательное изменение одних и поддержание в определенных пределах других), направленное на достижение цели полета. Процесс управления полётом КА является сложным процессом, поэтому необходимо разделять его на предметные области. Так, например, анализом состояния системы управления движением КА и системы бортовой радиотехнической аппаратуры занимаются разные специализированные подгруппы оперативной группы управления полетом КА в центре управления полётом (ЦУП). В тоже время объект управления является единым и стоит задача анализа КА в целом [1].
Одной из основных особенностей управления полетом КА является необходимость использования в процессе управления большого объема разнородных знаний в относительно компактные промежутки времени. В настоящее время система управления полетом построена таким образом, что основной объем знаний, относящихся к оперативному управлению полетом, хранится, используется и дополняется на Земле (в ЦУПе). Это обуславливается, в основном, ограничениями, связанными с массой КА, его полезным объемом и имеющимися технологиями построения информационно-вычислительных систем [2].
Эти знания включают в себя знания об объекте управления (КА); о технологиях контроля и управления состоянием КА; о параметрах среды, окружающей КА; о возможных отказах и нештатных ситуациях и т.д. Количество и порядок использования знаний в процессе оперативного управления полетом определяются, с одной стороны, имеющимся планом полета, с другой – складывающейся полетной ситуацией.
С развитием космических систем отмечается неуклонный рост объема информации, которой обменивается борт КА и ЦУП. Это обуславливается требованием повышения гибкости, а значит и эффективности, управления полетом и подкрепляется прогрессом в развитии средств связи. Вместе с увеличением объема информации, поступающей с борта КА в ЦУП, для обработки и анализа этой информации требуется оперативное использование большего количества знаний.
С возрастанием общего объема знаний, обрабатываемых при управлении полетом, увеличивается и объем знаний, обрабатываемых каждой предметной областью. При этом информационные возможности, имеющиеся в каждой из предметных областей, остаются прежними. Это приводит или к превышению допустимой информационной нагрузки, или к более глубокому сосредоточению на «своей» предметной области за счет снижения внимания к смежным вопросам. В том и другом случае повышается риск нештатных ситуаций.
Целью работы является рассмотрение выхода из вышеописанной ситуации путем повышения эффективности использования знаний в процессе оперативного управления полетом КА за счет их компоновки в виде определенных структур, а также выработка правил и технологий использования этих структурированных знаний. В качестве одного из возможных подхода формализации знаний может быть использовано построение онтологии предметной области. В термин «онтология» в данном случае используется в применении к информационным технологиям [3].
- Онтологический подход к организации знаний о процессе управления полетом КА
В общем случае онтология представляет собой некоторое описание мира исходя из задач определенной области. Это описание состоит из терминов и правил использования этих терминов, ограничивающих их значения в рамках этой конкретной области [4]. Целью создания онтологии является накопление, структурирование и повторное использование знаний.
Формально под онтологией часто понимается модель вида:
![]() ,
,
где С - конечное множество концептов (понятий) предметной области, R- конечное множество отношений между концептами (понятиями) предметной области, F - конечное множество функций аксиоматизации, заданных на концептах и/или отношениях онтологии [5].
Т.е. онтология представляет собой некий словарь понятий предметной области, в котором понятия связаны между собой определенным образом и устанавливаются всегда истинные положения (аксиомы). Эффект от использования онтологии должен достигаться за счет того, что при использовании минимально возможного набора составляющих – понятий, отношений, аксиом - достигается моделирование мира в требуемых целях с требуемой точностью.
Необходимо отметить, что онтология может играть роль не только декларативного описания объектов, но и отражать сценарии действий объектов (над объектами). Такие действия могут определяться различными законами (в текущем описании), функциями объектов, действиями субъектов над объектами т.д. Таким образом, к описанию объектов, добавляются некоторые модели пространства и времени, в рамках которых объекты существуют и функционируют.
Полный объем знаний, на которых построен процесс управления полетом определяется как онтологический базис управления полетом [5]. Т.е. под онтологическим базисом будем понимать совокупность разнородных эволюционирующих баз знаний, описывающих состояние и отслеживающих динамику изменений, происходящих в системе управления полетом космического аппарата.
Базы знаний, составляющие онтологический базис, далеко не всегда сформированы в виде некоторых программно технических комплексов с делением на конкретные подразделы. Наоборот, получение четкого описания знаний об организации и реализации процесса управления полетом КА во всех его аспектах является задачей крайне трудной и во многих случаях невыполнимой из-за сложности описываемых объектов, процессов и явлений, а также их влияния друг на друга.
Некоторые аспекты процесса оперативного управления могут быть скомпонованы в виде отдельных баз данных и формализованы в виде онтологий.
Рис. 1. Общее представление базы знания об объекте
Например, такие базы знаний содержат описания состояний отдельных бортовых систем КА и отслеживают динамику их изменений. Оценку состояния бортовых систем КА можно контролировать множеством параметров St, характеризующих их функционирование в любом режиме работы. В простых случаях специалист оперативной группы управления выделяет два вида класса состояния – «норма» и «не норма». Но в реальной работе могут быть выделены промежуточные состояния, которые описывают переход параметра от одного состояния к другому в направлении от «норма» к «не норма». Таким образом, множество возможных состояний контролируемого объекта – системы, подсистемы, узла представляет совокупность некоторого количества подмножеств, в простейшем случае двух:
Sшт![]() Sнс =St,
Sнс =St,
где Sшт –штатное состояние контролируемой системы, Sзам – замечание к работе контролируемой системы, Sнс – нештатное состояние контролируемой системы.
В каждом из этих подмножеств могут содержаться параметры, которые относятся более чем к одной системе. Следовательно, необходимо учитывать знания о взаимном влиянии работы систем друг на друга и параметрах характеризующие это влияние.
Рис. 2. Множество пересечения параметров состояния отдельных систем, где СУБК – система управления бортовым комплексом, СЭП – система электропитания, СОЖ – система обеспечения жизнедеятельности, БРТК – бортовой радиотехнический комплекс, СУДН – система управления движением и навигацией
В области пересечения множеств параметров контроля состояния бортовых систем необходимо осуществлять усиленный контроль, т.к. изменении одного параметра может привести к нештатной работе различных систем. Ход развития такой ситуации является трудно прогнозируемый.
При отклонениях от нормы необходимо в этих зонах руководствоваться в первую очередь сохранением работоспособности экипажа, а также пилотируемого космического аппарата (ПКА) в целом, при условиях минимального отклонения от планируемых целей полёта
Для эффективной работы с базами знаний необходимо разработать или создать правила работы с ними.
- Обобщённый алгоритм создания правил
Правила являются связующим звеном между онтологией и человеком. С их помощью показывается взаимодействие человека с онтологией и возможность адаптации знаний об объекте и процессе к изменениям. Отсутствие возможности формирования правил специалистом для пользования онтологией по соответствующей системе может привести к недостоверному восприятию ситуации, так и к нарушениям в структуре онтологии. Поскольку знания о процессе управления полётом специалистами различных систем могут пересекаться, то правила смогут решить проблемы восприятия не однозначной структуры знаний, что даст возможность адаптации пользования самой онтологии специалистами.
Для создания правила специалисту необходимо определиться в системе (инициализироваться), вписать название правила, например, «Замечание по системе СЭП в совместном полёте нескольких ПКА». Описать правило, например, «Падение значения напряжения буферных батарей (НББ)», далее необходимо описать уведомление, которое будет доставляться одному или более специалистам группы контроля. Например, «Снижение значения НББ ниже 31,3 В. Необходимо рассмотреть возможность проведения подзаряда буферной батареи. Ссылка на необходимый документ». Далее специалист определяет предпосылки правила, т.е. в каком случае специалисту необходимо прислать данное уведомление, например, «НББ ниже 31,3 В сбой телеметрической информации (ТМИ) исключён», далее специалист определяет в каком случае необходимо перезапускать правило. Здесь может быть несколько вариантов, например, правило запустилось один раз – уведомление пришло специалисту и более не посылается, или определено чётко количество раз, когда будет посылаться уведомление, и указан интервал между уведомлениями или другие варианты требуемые для данного события. Далее просмотр правила на корректность – подразумевает некою имитацию ситуации и обзор пришедшего сообщения, его восприятие и полноту. Если правило корректно оно сохраняется, в противном случае необходимо начинать с начала, с сохранения имени автора в системе разработки правила.
На рисунке 3 представлена возможная схема создания правил для контроля работы бортовых систем КА.
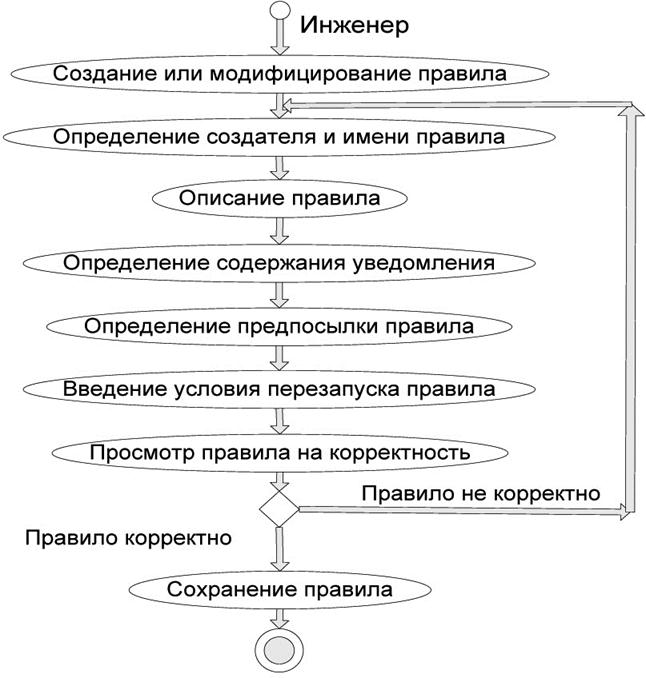
Рис. 3. Обобщённый алгоритм создания правил.
После изменения значений контролируемых параметров необходимо идентифицировать изменение потока данных с КА. Правила соответствующие данным изменениям направляются ответственному специалисту за эту область знаний и содержат информацию о последующих возможных изменениях потока данных с КА.
Применение правил позволяет сделать онтологию более адаптивной к особенностям каждого ПКА и глубже понять структуру самого программного средства поддержки принятия решения.
- Примеры возможной автоматизации ряда штатных и нештатных ситуаций
Рассмотрим применение знания о процессе управления на примере подготовки КА к проведению динамического режима в штатном режиме с использованием комбинированной двигательной установки (КДУ).
Комбинированная двигательная установка является исполнительным органом системы управления движением (СУД) и предназначена для создания тяговых усилий вдоль главных осей транспортного корабля и управляющих моментов вокруг этих осей. На рис. 4 представлена пневмогидравлическая схема КДУ.
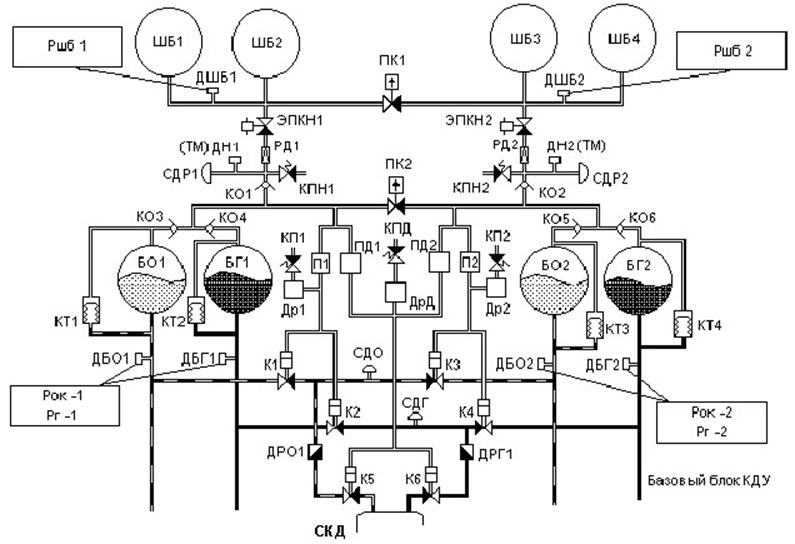
Рис. 4. Пневмогидравлическая схема КДУ
КДУ является двигательной установкой с вытеснительной системой подачи топлива, в которой используются двухкомпонентные жидкостные реактивные двигатели. В качестве компонентов топлива применяются окислитель и горючее, которые хранятся раздельно в баках.
Функционально КДУ состоит из:
· вытеснительной пневмосистемы (системы наддува);
· топливной системы;
· сближающе-корректирующего двигателя (СКД);
· двигателей причаливания и ориентации (ДПО).
На автономном участке полета КДУ обеспечивает выполнение корректирующих и тормозного импульса, а также вращение корабля относительно его центра масс и поступательное перемещение центра масс вдоль главных осей.
В качестве примера динамического режима рассмотрим выполнение маневра с помощью КДУ. Для его реализации необходимо провести ряд операций по подготовке КДУ.
Рис. 5. Подготовительные операции к проведению динамического режима.
Операция 1: «Выбор секции наддува». В зависимости от выполняемой операции производится выбор необходимой секции наддува и его перебор контролируется по ТМИ.
Операция 2: «Выбор секции баков». Аналогично с выбором наддува, выбор секции баков осуществляется исходя из запланированной операции и контролируется по ТМИ.
По командам на выбор 1 или 2 секции баков снимается признак «Объединение секций комбинированной двигательной установки (КДУ)».
Операция 3: «Открытие электрогидроклапанов по окислителю и горючему между топливными коллекторами». Выдаётся команда по командным радиолиниям на объединение коллекторов КДУ и контролируется по ТМИ.
Представленный пример показывает небольшую часть операций при управлении КА. Одновременно проводятся и другие подготовительные операции. Поэтому знания о процессе управления КА позволяют четко выполнять действия по достижению целей полета.
В качестве примера автоматизации рассмотрим возможные нештатные ситуации (НС), которые могут возникнуть в системе исполнительных органов спуска на различных участках полёта (на выведении, стыковке и др.).
Система исполнительных органов спуска (СИОС) является исполнительным органом системы управления спуском (СУС) и предназначена для создания управляющих моментов относительно осей спускаемого аппарата (СА) после разделения отсеков корабля при его спуске с орбиты на Землю.
По принципу действия СИОС является двигательной установкой с вытеснительной системой подачи топлива к однокомпонентным жидкостным реактивным двигателям.
На рисунке 6 представлена пневмогидравлическая схема системы исполнительных органов спуска, где КПА – пусковой пироклапан азота, КОА – обратный клапан азота, АТ – агрегат теплообмена КПрП – клапан предохранительный подачи, СТР – система терморегулирования, КВО – контур водяного охлаждения, КСП – клапана слива перекиси, КПП – пусковой пироклапан перекиси , СТЭО – системы термоэлектрического охлаждения, КОТ – пироклапан отсечения по тангажу, КОР – пирокалан отсечения рысканию, КОК(Д) – пироклапан отсечения по крену (дополнительных).
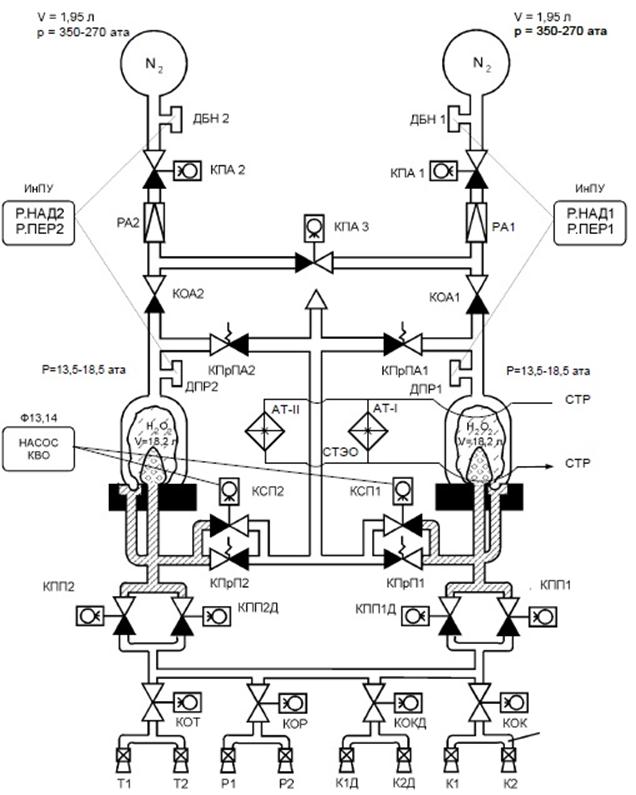
Рис. 6. Пневмогидравлическая схема СИОС
Во время автономного участка полета и совместного полета СИОС находится в режиме хранения и экипажем контролируются параметры давления баков наддува и баков перекиси в первых и вторых секциях.
На рисунке 7 представлена схема развития нештатных ситуаций в случае изменения давления баллонов наддува или баков перекиси.
Рис. 7. Общая схема развития нештатных ситуаций в СИОС
Представленные выше примеры наглядно показывают онтологический подход к управлению полетом КА. Однако для взаимодействия отдельных баз знаний необходимо обеспечить связи различного рода: логические, функциональные и т.д. Это можно достичь с помощью современных информационных технологий. Одной из таких технологий является мультиагентные системы (МАС).
МАС – мультиагентная система, направление искусственного интеллекта, которое для решения сложной задачи использует системы из взаимодействующих автономных программных объектов (агентов), которые способны анализировать ситуацию, принимать решения, взаимодействовать с другими такими же объектами, вести переговоры друг с другом для разрешения возникающих конфликтов и затем информировать систему и пользователя о результатах своих действий.
Актуальность применения МАС обусловлены следующими причинами.
1) Сложность современных систем, которая достигает такого уровня, что централизованное управление в них становится неэффективным из-за наличия огромных потоков информации;
2) Сами решаемые задачи или разрабатываемые системы подчас неоднородны и распределены а) в пространстве; б) в функциональном плане;
3) Понятие открытой системы означает, что у нее имеются развитые возможности и средства адаптации к изменениям среды, в том числе путем модификации своей структуры и параметров. Например, в случае возникновения нештатной ситуации, видоизменять и модифицировать конфигурацию звеньев контура управления в ходе полета.
Все вышеперечисленное показывает гибкость МАС к применению в различных областях. Таким образом, мы можем применить их в области управления ПКА. В частности, для контроля состоянии ПКА ходе полёта, выполнения динамических операция, а также для поддержки принятия решений в случае возникновения нештатных ситуации.
Выводы
Структуризация знаний о процессе и объекте управления, безусловно, является необходимым условием дальнейшего развития автоматических систем управления полётом. В статье продемонстрирована одна из новых возможностей организации и использования знаний в процессе оперативного управления полётом КА.
Сложившаяся структура организации управления полетом КА и развитие пилотируемой космонавтики требуют разработки и реализации новых подходов к организации управления полетом КА, что и определяет научную новизну в космонавтике. Онтологический подход является новой моделью организационной деятельности и позволяет выполнить важную задачу по повышению надежности и эффективности процесса управления полетом КА. Равным образом реализация намеченных задач с применение информационных технологий, в частности мультиагентных систем, играет важную роль в формировании дальнейших прогрессивных направлений развития данной области.
Список литературы
1. Кравец В.Г., Любинский В.Е. Основы управления космическими полётами. М.: Машиностроение, 1983. 256 с.
2. Соловьёв В.А., Лысенко Л.Н., Любинский В.Е. Управление космическими полётами. В 2-х частях. М.: МГТУ им. Н.Э.Баумана, 2009. 426 с.
3. Gruber T.R. Toward Principles for the Design of Ontologies Used for Knowledge Sharing // Technical Report KSL-93-04. Knowledge Systems Laboratory, Stanford University, 1993. 7 p.
4. Добров Б.В., Иванов В.В., Лукашевич Н.В., Соловьев В.Д. Онтологии и тезаурусы: модели, инструменты, приложения. М.: ИНТУИТ, 2008. 220 с.
5. Gomez-Perez A., Benjamins V.R. Overview of Knowledge Sharing and Reuse Components: Ontologies and Problem-Solving Metods // Proc. of the IJCAI-99 workshop on Ontologies and Problem-Solving Metods (KRR5). Stockholm, Sweden. 1999. 12 p.
6. Glenn S. Semmel, Steven R. Davis, Kurt W. Leucht, Dan A. Rowe, Kevin E. Smith, Ryan l O'Farrel, Ladislau Boloni. NESTA: NASA engineering Shuttle telemetry agent // AI Magazine. 2006. Vol. 27, No.3. P. 25-35.
7. Гаврилов Т.Л., Хорошевская В.Ф. Базы знаний интеллектуальных систем. СПб.: Питер, 2001. 352 с.
8. Поспелов Д.А. Многоагентные системы – настоящее и будущее // Информационные технологии и вычислительные системы. 1998. № 1. С. 11-14.
Публикации с ключевыми словами: онтология, управление полетом, мультиагентные системы, онтологический подход, оперативный контроль
Публикации со словами: онтология, управление полетом, мультиагентные системы, онтологический подход, оперативный контроль
Смотри также:
- 77-30569/2229653 Моделирование сценариев оперативного управления полетом космического аппарата
- Применение онтологий в системах поддержки процессов коллективного выбора
- Метод адаптация интерфейсов пользователей на терминологию предметной области в системах формирования и использования распределенных гетерогенных информационных ресурсов
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||