научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 01, январь 2014
DOI: 10.7463/0114.0646446
УДК 531.36
Россия, Московский государственный университет пищевых производств
Россия, Московский авиационный институт
Россия, МГТУ им. Н.Э. Баумана
1. Введение. Учебно-лабораторный стенд BALL&BEAM, благодаря доступности понимания принципа действия и простоте устройства для применения в лаборатории - популярная, широко распространеннаяво всем мире [1] нелинейная управляемая система. Эта установка является неустойчивой (при отсутствии управления) системой, а, как известно [2], исследование задач управления движением именно неустойчивых объектов является одним из наиболее актуальных направлений современной теории управления. Но широкое использование таких стендов [1] объясняется не только простотой их применения, как реальных устройств для тестирования эффективности законов управления, предлагаемых современной теорией управления. Большое значение для широкого распространения устройств такого типа связано и с тем обстоятельством, что при их функционировании отсутствует опасность, которая обычно сопровождает [1] использование в лаборатории реальных неустойчивых систем.
Вместе с тем, несмотря на многочисленные публикации по исследованию динамики систем, содержащих в своем составе шарик и желоб (большой библиографический список имеется, кроме [1], напр., в [3, 4]), рассмотрение таких задач далеко от завершения. Это связано с тем, что в большинстве работ [3, 4, 10, 11, 12], кроме [5], при получении математической модели системBall & Beam, в которых угол наклона желоба меняется за счет поворота колеса( связанного с ним некоторым стержнем), так или иначе, без всякого обоснования используется линеаризация сложной нелинейной геометрической связи. Поэтому используемые в таких работах математические модели механической компоненты (систем такой конструкции) являются неточными, что имеет принципиальное значение, особенно [6, 7], при исследовании их устойчивости.
Кроме того, в большей части работ, в которых предпринимаются (см., напр., [1]) попытки сравнительного анализа полученных по данной проблеме результатов, вообще не уделяется внимания точности и строгости применяемых математических моделей механических компонент таких мехатронных систем. Сравниваются [1] только типы законов управления и применяемые для их формирования методы, в то время как анализируются системы принципиально разной конструкции и с разной размерностью фазового пространства механической компоненты и, соответственно, с различной степенью строгости математических моделей. Например, сравниваются законы управления как для систем с совершенно строгой моделью в виде уравнений Лагранжа второго рода [1, 8, 9] для конструкции, когда желоб наклоняется за счет поворота вала приводного двигателя без всякого стержня (при отсутствии нелинейной геометрической связи), так и для систем [3, 4, 10, 11, 12] при наличии нелинейной геометрической связи. А для систем такого вида уравнения Лагранжа второго рода в общем случае неприменимы [6, 7] потому, что используемые координаты не являются независимыми.
Таким образом, несмотря на большое количество исследований, динамика системы Ball and Beam требует дальнейшего рассмотрения, в том числе и в отношении моделирования ее механической компоненты. Как и любую систему со сложными геометрическими связями (которые не дают возможности исключения зависимых координат), гораздо выгоднее рассматривать эту систему, как систему с избыточными координатами.
В данной работе предлагаемый в [6, 7] метод исследования устойчивости и стабилизации положений равновесия систем с геометрическими связями применяется к устройству Ball & Beam с уточненной по сравнению с [6, 7] моделью механической части. Для построения математической модели механической части стенда используются уравнения Шульгина [13] в избыточных координатах. При наличии одной геометрической связи между двумя координатами в этой задаче возможны два варианта выбора избыточной координаты. Показано, что от выбора избыточной координаты существенно зависит выбор управляемой подсистемы, а управляющее воздействие зависит от переменных выбранной подсистемы. При этом, кроме известного, указано еще одно положение равновесия системы – для ненулевого значения угла поворота колеса. Такое положение равновесия принципиально не может быть получено при линеаризации уравнения нелинейной связи. Кроме того ,при исследовании устойчивости такого положения равновесия нельзя будет пользоваться уравнениями Лагранжа второго рода, получаемых при использовании линейной связи [7].
Полученные результаты частично докладывались на конференциях[14, 15, 16].
- Уравнения М.Ф. Шульгина. Пусть конфигурация механической системы задана параметрами, взятыми в числе, превосходящем число степеней свободы. На эти параметры наложены геометрические связи
![]()
Если продифференцировать эти связи по времени и выразить зависимые скорости через независимые, получим линейные (голономные) дифференциальные связи в виде

Для таких систем удобно использовать уравнения в избыточных координатах в форме М.Ф.Шульгина [13 ,6, 7]

Где ![]() - результат исключения из кинетической энергии
- результат исключения из кинетической энергии ![]() зависимых скоростей с помощью дифференциальных (кинематических ) связей.
зависимых скоростей с помощью дифференциальных (кинематических ) связей.
2.Математическое моделирование механической компоненты устройства GBB 1005.
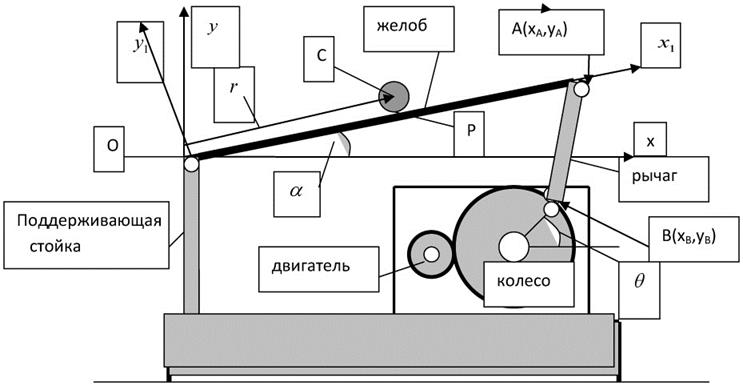
Рис. 1.
Устройство Ball & Beam (см. рис. 1) состоит из двух взаимосвязанных частей - механической части и управляемого электропривода. Для описания механической части введем три координаты ![]() . Одна из них является избыточной, так как на систему наложена геометрическая связь - расстояние между точками А и В постоянно:
. Одна из них является избыточной, так как на систему наложена геометрическая связь - расстояние между точками А и В постоянно: ![]()
Аналитически эта связь выражается нелинейным тригонометрическим уравнением
![]() (1)
(1)
где ОА =L, AB =l , d – радиус колеса. В системе GBB 1005 при ![]() и
и ![]() , рычаг АВ вертикален. В большинстве работ [3, 4, 10, 11, 12 ] по исследованию динамики систем такой конструкции применяется одна и та же необоснованно упрощенная модель - вместо полной нелинейной связи принимается линейная зависимость между углами
, рычаг АВ вертикален. В большинстве работ [3, 4, 10, 11, 12 ] по исследованию динамики систем такой конструкции применяется одна и та же необоснованно упрощенная модель - вместо полной нелинейной связи принимается линейная зависимость между углами
 .
.
В данной работе для построения математической модели механической части с учетом полной нелинейной связи использованы уравнения Шульгина. При этом, в отличие от работ [6, 7], рассматриваются два варианта выбора координаты r, определяющей положение шарика: r = ОР или r = ОС. Если при построении модели не пренебрегать размерами шарика, следует учесть, что расстояние ОС от начала координат О до центра шара С и расстояние ОР от начала координат до точки Р соприкосновения шара с желобом связаны соотношением ![]() , здесь R – радиус шара. Кроме того, возможны два варианта выбора избыточной координаты - в качестве избыточной можно выбрать или угол
, здесь R – радиус шара. Кроме того, возможны два варианта выбора избыточной координаты - в качестве избыточной можно выбрать или угол![]() , определяющий положение желоба, или угол поворота колеса
, определяющий положение желоба, или угол поворота колеса ![]() .
.
Замечание 1. В работе [5] рассматривается полное нелинейное уравнение связи, с точностью до обозначений совпадающее с уравнением (1). Авторы используют уравнения Лагранжа второго рода, рассматривая ![]() , как функцию
, как функцию![]() , но не выражая явно
, но не выражая явно ![]() . Применением к этой задаче разработанного многоэтапного
. Применением к этой задаче разработанного многоэтапного ![]() - метода получено семейство законов управления специального вида, содержащее три произвольные функции. В [5] рассматривается динамика механической части, без учета динамики исполнительного привода, т.е. рассмотрена задача прямого управления.
- метода получено семейство законов управления специального вида, содержащее три произвольные функции. В [5] рассматривается динамика механической части, без учета динамики исполнительного привода, т.е. рассмотрена задача прямого управления.
3. Математическая модель электродвигателя. В реальной установке GBB 1005 Ball&Beam движение колеса, к которому присоединен рычаг, управляется двигателем. Для построения полной модели управляемой системы следует добавить уравнение управляемого электропривода, Уравнение Кирхгофа, описывающего динамику коллекторного двигателя постоянного тока с независимым возбуждением, примем в виде
 ;
;  (2)
(2)
![]() - напряжение на выходе усилителя;
- напряжение на выходе усилителя; ![]() - напряжение противо-ЭДС;
- напряжение противо-ЭДС; ![]() - постоянная двигателя;
- постоянная двигателя; ![]() - индуктивность;
- индуктивность; ![]() - сопротивление;
- сопротивление; ![]() - коэффициент преобразователя питания,
- коэффициент преобразователя питания, ![]() - сила тока в якорной обмотке двигателя. В такой постановке за управление будет принято дополнительное напряжение на якоре двигателя. При таком способе реализации управляющих воздействий имеем систему непрямого управления [17] .
- сила тока в якорной обмотке двигателя. В такой постановке за управление будет принято дополнительное напряжение на якоре двигателя. При таком способе реализации управляющих воздействий имеем систему непрямого управления [17] .
При этом силу, действующую по координате![]() , можно принять в виде (см. [6, 7])
, можно принять в виде (см. [6, 7]) ![]() , где
, где ![]() - коэффициент сопротивления вращению, приведенный к двигателю;
- коэффициент сопротивления вращению, приведенный к двигателю; ![]() - электромеханическая постоянная двигателя.
- электромеханическая постоянная двигателя.
4. Стабилизация равновесия упрощенной системы. Рассмотрим сначала задачу при тех же предположениях, что и в [6]. Пусть кинетическая и потенциальная энергии имеют вид

m – масса; J - момент инерции шара; ![]() - момент инерции всей системы, приведённый к двигателю.
- момент инерции всей системы, приведённый к двигателю.
Дифференцируя связь (1) по времени, получим
 (3)
(3)
Кинетическая энергия после исключения зависимой скорости с помощью (3) будет иметь вид [6].

Система допускает [6] положение равновесия :
![]() ;
;![]() ;
;
Введем возмущения
![]() ;
; ![]()
и выделим первое приближение в уравнениях возмущенного движения (здесь ![]() -управление - дополнительное напряжение на якоре двигателя).
-управление - дополнительное напряжение на якоре двигателя).
Если в полных нелинейных уравнениях движения произвести замену (согласно теории критических случаев [18,19]): ![]() , то в уравнении связи в первом приближении выделяется нулевой корень. Тогда за управляемую подсистему можно выбрать подсистему, не включающую критическую переменную
, то в уравнении связи в первом приближении выделяется нулевой корень. Тогда за управляемую подсистему можно выбрать подсистему, не включающую критическую переменную
![]()
Для этой подсистемы выполнено условие управляемости:
![]()
Стабилизирующее управление ![]() может быть определено решением методом Н.Н. Красовского [20] линейно-квадратичной задачи стабилизации с подынтегральной функцией в критерии качества
может быть определено решением методом Н.Н. Красовского [20] линейно-квадратичной задачи стабилизации с подынтегральной функцией в критерии качества ![]()
![]() . Численное определение коэффициентов управления конкретной системы может быть определено с помощью [21].
. Численное определение коэффициентов управления конкретной системы может быть определено с помощью [21].
Графики переходных процессов по ![]() представлены на рис. 2.
представлены на рис. 2.
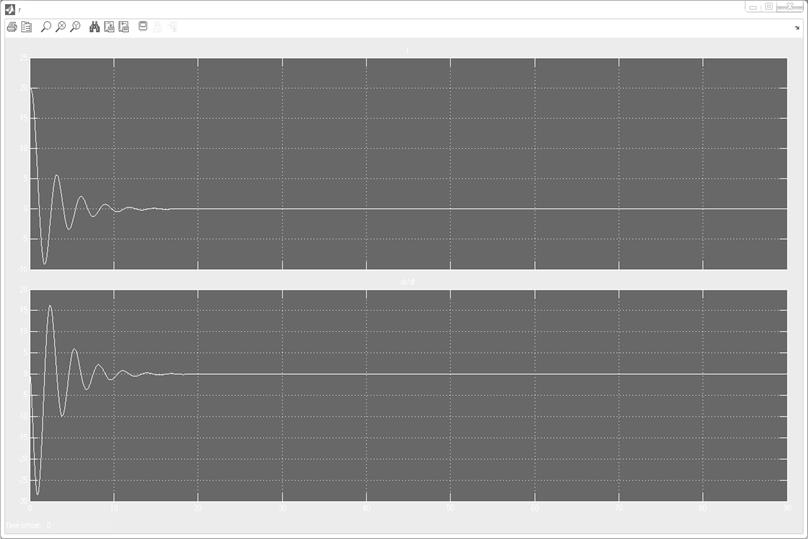
Рис. 2.
5. Уточнение уравнений механической части. Если учитывать размеры шара, уравнения движения системы существенно изменятся, так как в кинетической энергии появляются коэффициенты инерционной связи. Кроме того, изменяется выражение для потенциальной энергии.
Рассмотрим случай, когда за избыточную координату принят угол поворота колеса![]() ,а за координату, определяющую положение шарика r=ОС. Для механической части системы, включающей шар и ротор двигателя с редуктором, кинетическая и потенциальная энергии имеют вид
,а за координату, определяющую положение шарика r=ОС. Для механической части системы, включающей шар и ротор двигателя с редуктором, кинетическая и потенциальная энергии имеют вид
 ,
, ![]() ( 4)
( 4)
где ![]() - cкорость центра масс шара ,
- cкорость центра масс шара ,  - полная угловая скорость шара относительно системы координат Кёнига с центром в точке С и с осями, параллельными неподвижным. Это выражение можно получить из условия качения шарика без проскальзывания (см. чертеж рис. 3).
- полная угловая скорость шара относительно системы координат Кёнига с центром в точке С и с осями, параллельными неподвижным. Это выражение можно получить из условия качения шарика без проскальзывания (см. чертеж рис. 3).
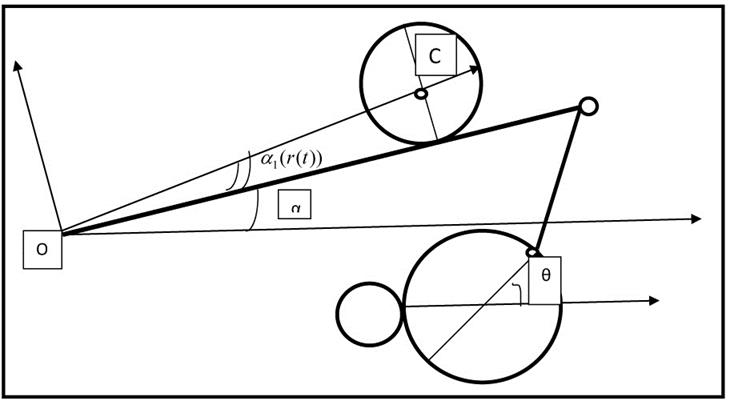
Рис. 3.
Тогда для кинетической энергии получим выражение

Кинетическая (5) и потенциальная (4) энергии отличаются от соответствующих выражений в [6, 7].
Дифференцируя связь (1) по времени и выбирая за избыточную координату угол поворота колеса ![]() , получим уравнение кинематической связи в виде
, получим уравнение кинематической связи в виде

Исключая из кинетической энергии зависимую скорость, получим выражение для T*,
 (7)
(7)
Уравнения Шульгина при таком выборе избыточной координаты будут иметь вид
 (8)
(8)
Где ![]() - сила, действующая по избыточной координате. Она содержит член
- сила, действующая по избыточной координате. Она содержит член ![]() , который можно считать механическим управляющим воздействием (представляющим собой момент, действующий со стороны якоря двигателя на колесо). Решение задачи стабилизации (как видно из второго уравнения Шульгина) будет зависеть от коэффициента кинематической связи
, который можно считать механическим управляющим воздействием (представляющим собой момент, действующий со стороны якоря двигателя на колесо). Решение задачи стабилизации (как видно из второго уравнения Шульгина) будет зависеть от коэффициента кинематической связи ![]() ). Исключим зависимую скорость с помощью уравнения связи (6) . Тогда уравнение Кирхгофа (2) перейдет в уравнение
). Исключим зависимую скорость с помощью уравнения связи (6) . Тогда уравнение Кирхгофа (2) перейдет в уравнение
 (9)
(9)
А сила по избыточной координате примет вид
![]() (10)
(10)
6. Определение положений равновесия.
Из уравнений (8, 9,10) видно, что система допускает положения равновесия ![]() только при ненулевом значении силы тока. Значение силы тока, обеспечивающее существование положения равновесия, определяется из выражения
только при ненулевом значении силы тока. Значение силы тока, обеспечивающее существование положения равновесия, определяется из выражения
 (11)
(11)
Значение угла поворота колеса при равновесии определяется из уравнения геометрической связи (1), которое при ![]() получит форму
получит форму
![]() или ,
или ,  (12)
(12)
Это уравнение имеет три корня:
 (13)
(13)
При этом решениям ![]() соответствует в реальном стенде одна и та же конфигурация, при которой угол поворота колеса лежит во второй четверти.
соответствует в реальном стенде одна и та же конфигурация, при которой угол поворота колеса лежит во второй четверти.
Рис. 4.
Полученные уравнения и допускаемые ими равновесия отличаются от рассматриваемых в работах [6, 7] . Заметим, что если вместо точной нелинейной геометрической связи (1 ) принимается упрощенное линейное уравнение, очевидно, для положении равновесия возможно только одно решение ![]() . Решение задачи стабилизации будет существенно различным для разных положений равновесия.
. Решение задачи стабилизации будет существенно различным для разных положений равновесия.
7. Задача стабилизации положения равновесия ![]() уточненной модели
уточненной модели
![]() ;
;  (14)
(14)
Введём следующие обозначения -![]() ,- возмущения, u – управление - дополнительное напряжение на якоре двигателя, обеспечивающее стабилизацию заданного равновесия
,- возмущения, u – управление - дополнительное напряжение на якоре двигателя, обеспечивающее стабилизацию заданного равновесия ![]() .
.
![]() (15)
(15)
Уравнения первого приближения для всей системы будут иметь вид
 (16)
(16)
Последнее уравнение (16) представляет собой линейное приближение кинематической связи (6). Для выделения нулевого корня в характеристическом уравнении произведем в полной системе уравнений (6, 8, 9, 10) замену переменных [18, 19]: ![]() . После этой замены уравнение связи в первом приближении примет вид
. После этой замены уравнение связи в первом приближении примет вид ![]() (нулевой корень соответствует этой переменной). Произведенная замена переменных не изменяет коэффициентов остальных уравнений первого приближения всей системы, так как эти уравнения не зависят от избыточной переменной
(нулевой корень соответствует этой переменной). Произведенная замена переменных не изменяет коэффициентов остальных уравнений первого приближения всей системы, так как эти уравнения не зависят от избыточной переменной ![]() . Заметим, что координата
. Заметим, что координата ![]() является псевдоциклической в том смысле, что кинетическая (5) и потенциальная (4) энергии не зависят явно от этой координаты. Выражение (7) и нелинейные члены полной системы уравнений движения (6, 8, 10) , будут зависеть от нее из-за коэффициента кинематической связи.
является псевдоциклической в том смысле, что кинетическая (5) и потенциальная (4) энергии не зависят явно от этой координаты. Выражение (7) и нелинейные члены полной системы уравнений движения (6, 8, 10) , будут зависеть от нее из-за коэффициента кинематической связи.
Нетрудно убедиться (после приведения к нормальной форме), что для линейной подсистемы, включающей первое приближения уравнений Шульгина и уравнения Кирхгофа, выполнено условие управляемости – достаточное условие разрешимости линейно-квадратичной задачи стабилизации ее нулевого решения. Для выбранной управляемой линейной подсистемы, не включающей уравнения связи, полученное управление будет зависеть от переменных этой подсистемы. При практическом решении в качестве подынтегральной функции в критерии качества удобно взять [20] квадратичную форму ![]() .
.
Из асимптотической устойчивости нулевого решения этой линейной подсистемы, замкнутой найденным управлением, согласно теореме [7], в полной нелинейной системе получим асимптотическую устойчивость исследуемого равновесия по отношению ко всем ее переменным. Коэффициенты стабилизирующего управления могут быть найдены с использованием метода, изложенного в работах [20] и [21] .
8. Другой случай выбора переменных. Примем за обобщенную координату r = ОР, а за избыточную координату – угол наклона желоба ![]() . Тогда кинематическое уравнение связи возьмем в виде (3). Потенциальная энергия в этом случае имеет вид
. Тогда кинематическое уравнение связи возьмем в виде (3). Потенциальная энергия в этом случае имеет вид
![]() (18)
(18)
Для кинетической энергии в этом случае будем иметь
 (19)
(19)
а после исключения зависимой скорости с помощью (3) –
 (20)
(20)
Первое уравнение Шульгина в рассматриваемом случае будет иметь тот же вид, как и в (8), а второе уравнение примет вид
 (21)
(21)
К этим уравнениям надо добавить уравнения Кирхгофа (2)
9. Стабилизация положения равновесия. В этом случае система допускает следующее положение равновесия:
![]() ,
, (22)
(22)
Если ввести возмущения , аналогично (16) ,первое приближение для всей системы получит вид

![]() .
.
![]()
Замечание 2. Для положения равновесия  в обоих случаях выбора избыточных координат
в обоих случаях выбора избыточных координат . Поэтому уравнения первого приближения не содержат линейных членов разложения коэффициентов кинематических связей. Для другого положения равновесия (13) эти выражения не обращаются в нуль, и уравнения возмущенного движения будут иметь другой вид.
. Поэтому уравнения первого приближения не содержат линейных членов разложения коэффициентов кинематических связей. Для другого положения равновесия (13) эти выражения не обращаются в нуль, и уравнения возмущенного движения будут иметь другой вид.
Проведем в полной нелинейной системе уравнений замену [18, 19]:
![]()
для выделения нулевого корня характеристического уравнения, соответствующего переменной ![]() . После произведенной замены первое приближение уравнений Шульгина примет вид.
. После произведенной замены первое приближение уравнений Шульгина примет вид.

В этом случае управляемую подсистему выбираем в виде (куда не включаются члены, зависящие от ![]() )
)

![]()
Управление, решающее задачу стабилизации до асимптотической устойчивости положения равновесия (22) для выделенной линейной подсистемы, будет зависеть от ее переменных. Это управление обеспечивает асимптотическую устойчивость равновесия и для полной нелинейной системы по всем ее переменным [7].
Замечание 3. В отличие от упрощенной модели в п. 4 в выражениях T* для кинетической энергии (7) и (20) в уточненной модели присутствуют коэффициенты инерционной связи при произведениях скоростей (таких коэффициентов нет в упрощенной модели). Вследствие этого уравнения возмущенного движения и в первом приближении в уточненной модели отличаются от соответствующих уравнений в [6, 7]. Кроме того, в уточненной модели появляются дополнительные члены от потенциальной энергии.
Заключение.
В работе показано, что в математической модели с учетом полной нелинейной геометрической связи возможно другое положение равновесия системы GBB 1005 BALL&BEAM, ранее не рассматривавшееся .Это положение равновесия не может быть найдено при замене нелинейной связи ее линейным приближением. При исследовании устойчивости и стабилизации этого положения равновесия нельзя будет пользоваться уравнениями Лагранжа второго рода, полученными при использовании линейной связи.
Проведено уточнение математической модели механической части системы с учетом размеров шара.
Показано, что при наличии одной геометрической связи возможны два варианта выбора избыточной координаты. При этом предпочтительнее за избыточную выбирать ту координату, от которой не зависят первоначальные выражения кинетической и потенциальной энергий.
Рассматриваемая система является мехатронной электромеханической системой. Для исследования движения электромеханических систем [22] наряду с уравнениями механической части нужно рассматривать и уравнения электрической части. Исследуемую в данной работе систему можно рассматривать, как систему непрямого управления [17] при учете уравнений электропривода постоянного тока.
Для выбранной линейной управляемой подсистемы линейно-квадратичная задача стабилизации может быть решена методом Н.Н.Красовского [20,21] (ср. [4,14]) . При этом выбор линейной подсистемы зависит от выбора избыточной координаты. Найденное для линейной подсистемы управление решает задачу стабилизации (до асимптотической устойчивости) положения равновесия для полной нелинейной системы уравнений по всем ее переменным в силу теоремы, доказанной в работе [7] .
Список литературы.
1. Aguilar-Ibanez С., Suarez-Castanon M.S., de Jesu´ s Rubio J. Stabilization of the Ball on the Beam System by Means of the Inverse Lyapunov Approach // Mathematical Problems in Engineering. 2012. Vol. 2012. Article ID 810597, 13 pages. DOI: 10.1155/2012/810597
2. Формальский А.М. Управление движением неустойчивых объектов. М.: Физматлит, 2013. 232 с.
3. Min-Sung Koo, Ho-Lim Choi, Jong-Tae Lim Adaptive nonlinear control of a ball and beam system using centrifugal force term // International Journal of Innovative Computing, Information and Control. 2012. Vol. 8, no. 9. P. 5999-6009.
4. Keshmiri M., Jahromi A.F., Mohebbi A., Amoozgar M.H., Wen-Fang Xie. Modeling and control of ball and beam system using model based and non-model based control approaches // International Journal on Smart Sensing and Intelligent Systems. 2012. Vol. 5, no. 1. P. 14-35.
5. Andreev F., Auckly D., Gosavi S., Kapitanski L., Kelkar A., White W. Matching, linear systems, and the ball and beam // Automatica. 2002. Vol. 38, no. 12. P. 2147-2152.
6. Красинская Э.М., Красинский А.Я., Обносов К.Б. О развитии научных методов школы М.Ф. Шульгина в применении к задачам устойчивости и стабилизации равновесий мехатронных систем с избыточными координатами // Сборник научно-методических статей. Теоретическая механика. Вып. 28 / Под ред. проф. Ю.Г. Мартыненко. М.: Изд-во МГУ, 2012. С. 169-184.
7. Красинская Э.М. ,Красинский А.Я. Об устойчивости и стабилизации равновесия механических систем с избыточными координатами // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. Журн. 2013. № 3.DOI: 10.7463/0313.0541146
8. Aoustin Y., Formal’skii A.M. Beam-and-Ball System under Limited Control: Stabilization with Large Basin of Attraction // 2009 American Control Conference (Hyatt Regency Riverfront, St. Louis, MO, USA June 10-12, 2009). AACC, 2009. P. 555-560.
9. Hamed B. Application of a LabVIEW for Real-Time Control of Ball and Beam System // IACSIT International Journal of Engineering and Technology. 2010. Vol. 2, no. 4. P. 401-407
10. Yu W, Ortiz F. Stability analysis of PD regulation for ball and beam system // Proceedings of 2005 IEEE Conference on Control Applications. CCA 2005. Toronto, Canada, August 28-31, 2005. P. 517-522. DOI: 10.1109/CCA.2005.1507178
11. Yu W. Nonlinear PD regulation for ball and beam system // Int. Journal of Electrical Engineering Education. 2009. Vol. 46, no. 1. P. 59-73.
12. Rahmat M.F., Wahid H., Wahab N.A. Application of intelligent controller in a ball and beam control system // International Journal on Smart Sensing and Intelligent Systems. 2010. Vol. 3, no. 1. P. 45-60
13. Шульгин М.Ф. О некоторых дифференциальных уравнениях аналитической динамики и их интегрировании. Ташкент: Изд-во САГУ, 1958. 183 с. (Труды Среднеазиатского государственного университета им. В.И. Ленина; вып. 144).
14. Красинская Э.М., Красинский А.Я. Моделирование динамики стенда Вall&Вeam как мехатронной системы с избыточной координатой // Межд. конф. «Восьмые Окуневские чтения» (Санкт-Петербург, Россия, 25-28 июня 2013 г.): материалы докл. СПб.: Балтийский гос. ун-т, 2013. C. 189-191.
15. Красинский А.Я., Красинская Э.М. О применении теории критических случаев к задачам стабилизации при неполной информации // Динамические системы: Устойчивость, управление, оптимизация. К 95-летию со дня рождения академика Е.А. Барбашина: Тез. докл. междунар. конф. (Минск, 1-5 октября 2013 г.). Минск: Ин-т математики НАН Беларуси, 2013. С. 157-159.
16. Красинский А.Я., Красинская Э.М. Моделирование динамики стенда «GBB 1005 Ball & Beam» как управляемой механической системы с избыточными координатами // Научная конференция «Фундаментальные и прикладные задачи механики», посвященная 135-летию кафедры теоретической механики им. проф. Н.Е. Жуковского МГТУ им. Н.Э. Баумана (23-25 октября 2013 г.): Расширенная программа с аннотациями докладов. Секция 1. Режим доступа: http://hoster.bmstu.ru/~fn3/news/KONF-135/program.pdf (дата обращения 01.12.2013).
17. Кунцевич В.М., Лычак М.М. Синтез систем автоматического управления с помощью функций Ляпунова. М.: Наука, 1977. 400 с.
18. Ляпунов А.М. Собрание соч. Т. 2. М.-Л.: Изд. АН СССР, 1956. 472 с.
19. Малкин И.Г. Теория устойчивости движения. М.: Наука, 1966. 532 с.
20. Красовский Н.Н. Проблемы стабилизации управляемых движений // В кн. Малкин И.Г. Теория устойчивости движения. М.: Наука, 1966. С. 475-514.
21. Красинский А.Я., Иофе В.В., Каюмова Д.Р., Халиков А.А. Программное составление уравнений движения и исследование стабилизации механических движений: Свидетельство о гос. регистрации программы для ЭВМ № 2011615362. Российская Федерация. Заявка № 2011613568; зарегистрирована в Реестре программ для ЭВМ 23 мая 2011 г.
22. Мартыненко Ю.Г. Аналитическая динамика электромеханических систем / под. ред. И.В. Новожилова. М.: МЭИ, 1984. 64 с.
Публикации с ключевыми словами: устойчивость, стабилизация, управляемые механические системы, BALL&BEAM
Публикации со словами: устойчивость, стабилизация, управляемые механические системы, BALL&BEAM
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||