научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК 004.891: 623.46: 629.78
МГТУ им. Н.Э. Баумана
Постановка задачи.
Задано множество траекторий баллистических целей. Заданы ТТХ ракетного комплекса перехвата барьерного типа (например, Midcoursedefensesegment: Ground-BasedInterceptors, Standard Missile-3 Sea-BasedInterceptors) и радиолокационной станции (дальность действия ![]() ) и её дислокация (точка А с географическими координатами [φ; λ]). Графическая интерпретация приведена на рис. 1. Принято допущение, что в апогейной области траектории движение целей может быть аппроксимировано орбитой, близкой к круговой с радиусом
) и её дислокация (точка А с географическими координатами [φ; λ]). Графическая интерпретация приведена на рис. 1. Принято допущение, что в апогейной области траектории движение целей может быть аппроксимировано орбитой, близкой к круговой с радиусом ![]() , наклонением i и долготой восходящего узла Ω. Требуется разработать методический аппарат, обеспечивающий определение района дислокации средств ракетного комплекса перехвата при условии, что перехват баллистических целей должен быть осуществлен по целеуказанию от радиолокационной станции.
, наклонением i и долготой восходящего узла Ω. Требуется разработать методический аппарат, обеспечивающий определение района дислокации средств ракетного комплекса перехвата при условии, что перехват баллистических целей должен быть осуществлен по целеуказанию от радиолокационной станции.
Анализ циклограммы функционирования ракетного комплекса перехвата
Рассмотрим обобщённую циклограмму боевого применения гипотетического ракетного комплекса перехвата. После получения приказа на боевое применение начинается этап подготовки к старту, в ходе которого производится контроль состояния бортовых систем ракеты-перехватчика (РП), рассчитывается и закладывается на борт полётное задание, производятся подготовка средств и систем комплекса к старту. В расчетное время производится старт ракеты-перехватчика. Последовательно работают ступени ракеты-перехватчика (например, I, II и III ступени), перехватчик выводится в расчетную точку, где должен при помощи своих визирных систем обнаружить цель, осуществить захват на автосопровождение, после чего начинается этап самонаведения, в ходе которого устраняются ошибки выведения предыдущих этапов.
Циклограмма боевого применения гипотетического ракетного комплекса перехвата приведена на рис. 2
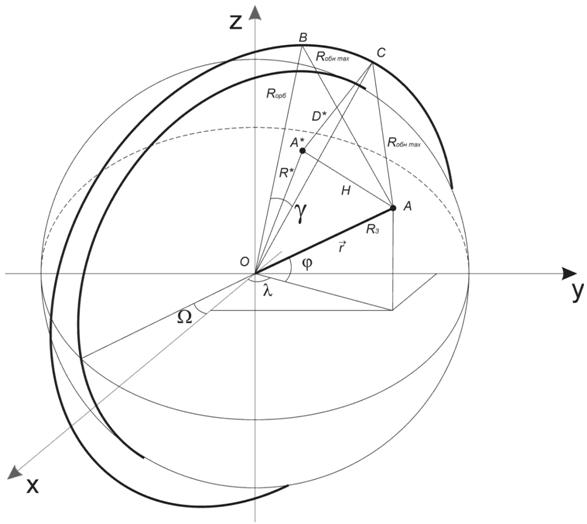
Рис. 1.

Рис. 2. Циклограмма боевого применения ракетного комплекса перехвата
Если в ракете-перехватчике реализован режим коррекции, то возможна передача с земли уточнённого целеуказания (ЦУ). Очевидно, что отработка уточненного целеуказания возможна только на активном участке. Таким образом, уточненное целеуказание должно быть получено не позднее окончания работы последней ступени выведения.
Рассмотрим основные этапы выработки целеуказания при взаимодействии с измерительным средством (ИС). После входа цели в зону действия средства производится набор точности, измерение параметров движения цели, передача результатов измерений на командный пункт, где на их основе производится расчет и уточнение траекторных параметров цели. После чего рассчитывается уточненное целеуказание и по каналам связи передаётся на борт ракеты-перехватчика.
Если при выборе места дислокации ракетного комплекса перехвата ориентироваться на возможность обеспечения приданным измерительным средством уточненного целеуказания, то должен выполняться соответствующий временной баланс, т.е. не позднее момента окончания работы последней ступени все операции связанные с вычислением и передачей уточненного целеуказания на борт ракеты-перехватчика должны быть закончены.
Поясним на примере. Для определённости и простоты будем рассматривать траектории с азимутами, близкими к нулевым. Рассмотрим предельный случай, когда цель проходит зону действия измерительного средства за минимальное время достаточное для проведения качественных измерений.
Время нахождения цели в зоне действия измерительного средства может быть рассчитано по частной методике, приведенной ниже.
Частная методика оценки времени нахождения баллистической цели в зоне действия радиолокационной станции
Для круговой орбиты время нахождения в зоне действия радиолокационной станции ![]() , где
, где ![]() - угловая скорость движения цели по орбите,
- угловая скорость движения цели по орбите, ![]() - центральный угол, опирающийся на дугу, соответствующую участку орбиты находящемуся в зоне действия радиолокационной станции (рис. 1 и 3). Тогда, искомый угол можно определить из треугольника ОА*С:
- центральный угол, опирающийся на дугу, соответствующую участку орбиты находящемуся в зоне действия радиолокационной станции (рис. 1 и 3). Тогда, искомый угол можно определить из треугольника ОА*С:
 ,
, ![]() , (1)
, (1)
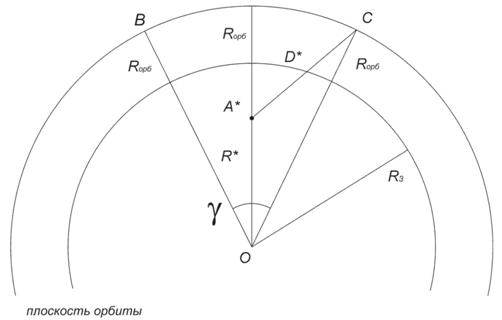
Рис. 3.
Неизвестные параметры ![]() и
и ![]() являются проекциями радиус вектора
являются проекциями радиус вектора ![]() на плоскость орбиты и нормаль к ней. Координаты радиус вектора
на плоскость орбиты и нормаль к ней. Координаты радиус вектора ![]() в системе ОXYZ равны:
в системе ОXYZ равны:
![]() .
.
Координаты нормального вектора плоскости орбиты можно найти как векторное произведение двух непараллельных единичных векторов, расположенных в плоскости орбиты. В качестве одного из них можно взять вектор, определяющий направление восходящего узла ![]() .
.
В качестве второго вектор, получаемый при пересечении плоскости орбиты плоскостью перпендикулярной экватору. Очевидно, что это вектор составляет с плоскостью экватора угол равный наклонению орбиты.
Его координаты равны ![]() . Тогда их векторное произведение и, соответственно, координаты нормали
. Тогда их векторное произведение и, соответственно, координаты нормали ![]() к плоскости орбиты равны
к плоскости орбиты равны ![]() .
.
Тогда,
![]() ,
,
![]() .
.
Возвращаясь к (1), имеем
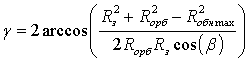 . (2)
. (2)
Исходя из условия существования треугольника ОА*С, имеем: ![]() , что соответствует условию попадания баллистической цели в зону обнаружения радиолокационной станции. Кроме того, для дуги ВС должно выполняться условие видимости баллистической цели над горизонтом.
, что соответствует условию попадания баллистической цели в зону обнаружения радиолокационной станции. Кроме того, для дуги ВС должно выполняться условие видимости баллистической цели над горизонтом.
Для крайних точек В и С это будет представлено в виде требования ![]() . Если
. Если ![]() достаточно велико, то это требование может не выполняется, и дуга ВС будет частично не видна из-за горизонта, а формула (2) будет давать неверное значение.
достаточно велико, то это требование может не выполняется, и дуга ВС будет частично не видна из-за горизонта, а формула (2) будет давать неверное значение.
В этом случае ![]() следует заменить на величину
следует заменить на величину ![]() . Таким образом, с учётом выполнения требований попадания цели в зону обнаружения радиолокационной станции и его видимости над горизонтом, угол
. Таким образом, с учётом выполнения требований попадания цели в зону обнаружения радиолокационной станции и его видимости над горизонтом, угол ![]() и время нахождения баллистической цели зоне действия радиолокационной станции рассчитываются следующим образом:
и время нахождения баллистической цели зоне действия радиолокационной станции рассчитываются следующим образом:
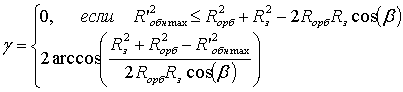 ,
,
 , (3)
, (3)
![]() ,
, ![]() .
.
Алгоритм определения географических координат пусковой установки
За точку отсчёта возьмем момент входа цели в зону действия измерительного средства. Тогда, через время T=tизм+tрасч+tпер, требуемое для измерения параметров движения цели (tизм), расчета уточнённого целеуказания (tрасч) и передачи его на борт ракеты-перехватчика (tпер), цель будет находится в некоторой точке А. Учитывая условие выполнения временного баланса для передачи уточненного целеуказания в этот момент должна заканчивать работу последняя ступень выведения. Далее, в соответствии с циклограммой боевой работы ракетного комплекса перехвата, через некоторое время, определяемое длительностью выполняемых оставшихся этапов боевой работы, происходит перехват цели в некоторой точке В.
Построим окружность с центром в точке В и радиусом равным максимальной дальности действия ракетного комплекса перехвата RРКПmax. Таким образом, мы получим область возможного расположения пусковых установок ракетного комплекса перехвата, где возможно оперативное взаимодействие ракетного комплекса перехвата с измерительным средством.
Учитывая, что у ракетного комплекса перехвата могут быть ограничения по секторам пуска, максимальной скорости сближения, углам некомпланарности и т.д. от построенной окружности необходимо отсечь области, не удовлетворяющие указанным ограничениям. Например, из всей окружности выделим сектор, внутри которого угол между скоростью перехватчика и цели в горизонтальной плоскости не превышает установленной величины. Далее из полученного сектора удалим внутреннюю часть, в которой не выполняется ограничение по углу между скоростью перехватчика и цели в вертикальной плоскости. Полученный результат изображён на рис. 4.
Примечание. На рис. 4 и 5 области возможного расположения пусковых установок ракетного комплекса перехвата и совокупные области для всех обслуживаемых траекторий изображены схематично.
Следует отметить, что для различных типов ракетного комплекса перехвата форма полученной области может существенно отличаться в зависимости от схемы выведения ракеты-перехватчика, используемых технических решений и ограничений, присущих конкретным комплексам.
Частная методика определения потенциальной зоны поражения ракетного комплекса перехвата
Для ракетного комплекса перехвата имеет место ограничение максимальной скорости сближения перехватчика с целью ![]() , откуда, по теореме косинусов, можно определить максимальный угол между векторами скорости цели и перехватчика
, откуда, по теореме косинусов, можно определить максимальный угол между векторами скорости цели и перехватчика
 .
.
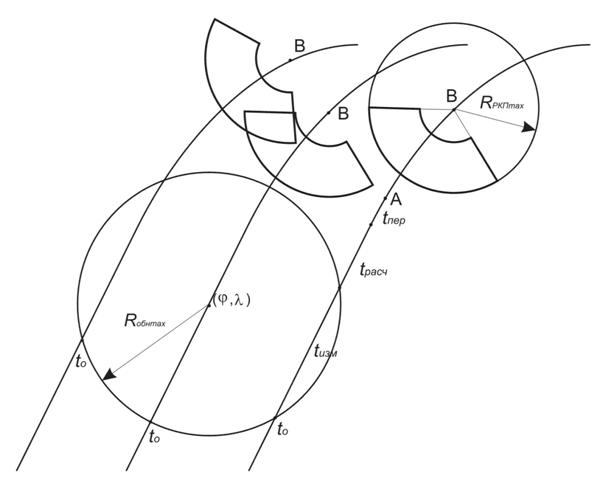
Рис. 4. Построение зоны возможного расположения ракетного комплекса перехвата
На рис. 6 изображены зависимости скорости сближения ![]() от угла между векторами скорости цели и перехватчика (
от угла между векторами скорости цели и перехватчика (![]() ) для различных значений
) для различных значений ![]() при фиксированной скорости цели
при фиксированной скорости цели ![]() км/с.
км/с.
Из графика видно, что для исключения зависимости от ракурса стрельбы необходимо обеспечить работоспособность системы наведения перехватчика при скоростях более 12 км/с. Если ограничится только передней полусферой, достаточно обеспечить скорость сближения не более 9 км/с. Будем считать, что вектор скорости цели находится в плоскости местного горизонта. Тогда допустимые направления вектора скорости перехватчика должны находиться внутри телесного угла ![]() и удовлетворять соотношению
и удовлетворять соотношению
![]() , (4)
, (4)
где ![]() - угол между вектором скорости перехватчика и местным горизонтом,
- угол между вектором скорости перехватчика и местным горизонтом,
![]() - угол некомпланарности орбит цели и перехватчика.
- угол некомпланарности орбит цели и перехватчика.
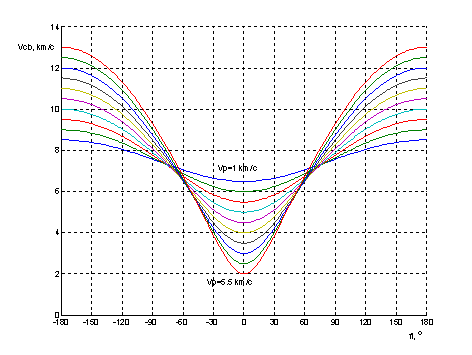
Рис. 6. Зависимости скорости сближения ![]() от угла между векторами скорости цели и перехватчика.
от угла между векторами скорости цели и перехватчика.
В случае стрельбы на максимальную дальность угол вектора скорости перехватчика с местным горизонтом близок к нулю и угол ![]() определяет допустимый сектор стрельбы. Если же стрельба ведется не на максимальную дальность, т.е. перехват осуществляется внутри зоны поражения ракетного комплекса перехвата, то угол
определяет допустимый сектор стрельбы. Если же стрельба ведется не на максимальную дальность, т.е. перехват осуществляется внутри зоны поражения ракетного комплекса перехвата, то угол ![]() может отличаться от нуля. Закон изменения
может отличаться от нуля. Закон изменения ![]() (рис. 7) будет определять форму области допустимых ракурсов перехвата. Рассмотрим несколько вариантов таких зависимостей.
(рис. 7) будет определять форму области допустимых ракурсов перехвата. Рассмотрим несколько вариантов таких зависимостей.
Пусть ![]() определяется степенной функцией вида
определяется степенной функцией вида 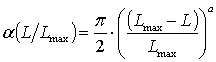 . Положим
. Положим ![]() ,
, ![]() км.
км.
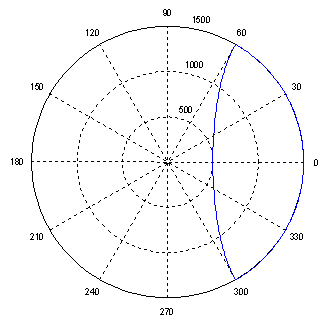
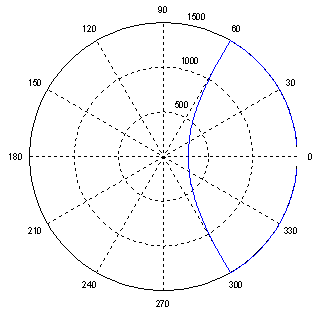
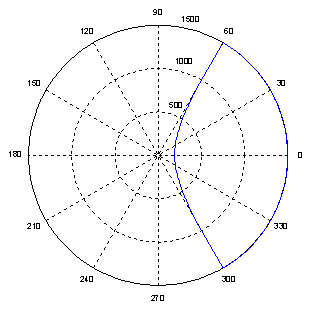
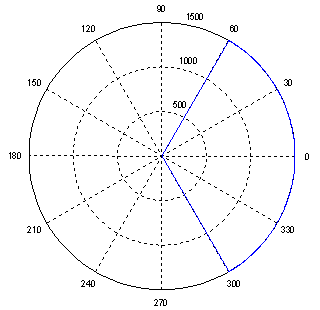
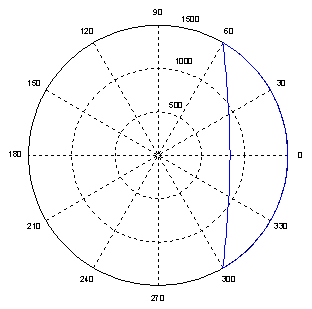
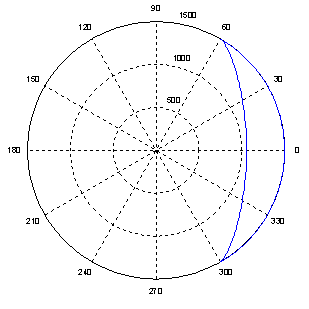
Тогда форма области, где выполняется условие (4) для различных значений a будет иметь вид, представленный на рис. 8-13. Откуда легко видеть, что форма и размер зоны поражения ракетного комплекса перехвата существенно зависит не только от ограничения на максимальный угол между векторами скорости цели и перехватчика ![]() , но и от закона изменения угла между вектором скорости перехватчика и местным горизонтом
, но и от закона изменения угла между вектором скорости перехватчика и местным горизонтом ![]() .
.
Таким образом, можно сделать вывод, что способ выведения перехватчика влияет, в конечном счете, на боевые возможности ракетного комплекса перехвата.
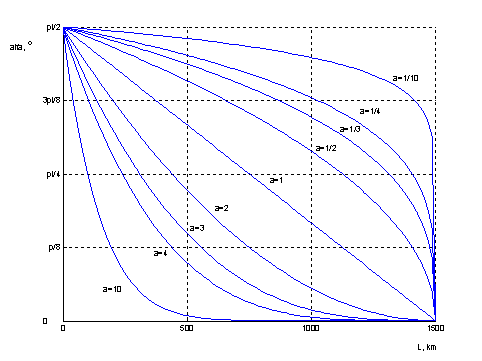
Рис. 7. Семейство кривых ![]() в зависимости от значения а
в зависимости от значения а
|
|
Рис. 8. Форма зоны поражения | Рис. 9. Форма зоны поражения |
|
|
Рис. 10. Форма зоны поражения | Рис. 11. Форма зоны поражения |
|
|
Рис. 12. Форма зоны поражения | Рис. 13. Форма зоны поражения |
Рекомендации по применению комплекса методик
Проведя описанную операцию для всех траекторий, попадающих зону действия измерительного средства, мы получим совокупную область, внутри которой выполняется временной баланс и возможно оперативное взаимодействие с измерительным средством.
В том случае, когда одна пусковая установка ракетного комплекса перехвата по дальности действия не перекроет весь диапазон траекторий, попадающих в зону действия измерительного средства, количество и места расположения пусковых установок ракетного комплекса перехвата выбираются исходя из выполнения требования перекрытия всех обслуживаемых измерительным средством траекторий, либо максимального их количества при минимальном количестве пусковых установок.
Аналогичным образом действуем и для траекторий с другими азимутами. В результате будет определена совокупность пусковых установок ракетного комплекса перехвата, обеспечивающая перекрытие всех возможных траекторий, по которым приданное измерительное средство может выдать уточненное целеуказание при условии выполнения временного баланса. Возможный вариант расположения пусковых установок ракетного комплекса перехвата изображён на рис. 5.
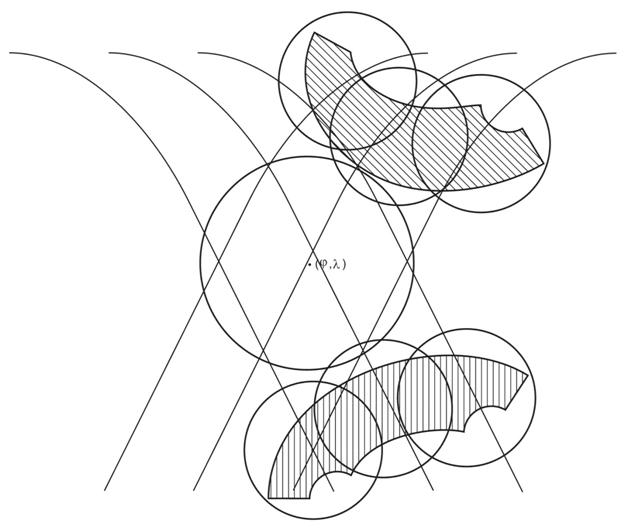
Рис. 5. Расположение пусковых установок с учётом перекрытия всех обслуживаемых измерительным средством траекторий
Очевидно, что определенное таким способом расположение пусковых установок ракетного комплекса перехвата не является единственным. Приведённый вариант является граничным, поскольку условие временного баланса здесь выполняется жёстко. Теоретически, может быть получено бесконечное множество вариантов, путем смещения пусковой установоки «вверх» по трассе цели для восходящих витков и «вниз», соответственно, для нисходящих. При этом для пусковой установки будет иметь место некоторый временной запас, в соответствие с которым уточненное целеуказание будет приходить раньше окончания работы последней ступени выведения, причем тем раньше, чем дальше мы сместили пусковую установку от её граничного положения.
Из приведенных рассуждений следует, что положение пусковой установки относительно зоны действия измерительного средства для заданной траектории определяется суммарным временем, требуемым на вычисление, доставку уточнённого целеуказания на борт и выполнение оставшихся этапов наведения после проведения коррекции. Уменьшение этого времени приведет к смещению пусковой установки по трассе цели ближе к измерительному средству. При этом зоны для восходящих и нисходящих траекторий будут располагаться более компактно. В этом случае, очевидно, потребуется меньшее количество пусковых установок. Кроме того, в этом случае возможен перехват в зоне действия измерительного средства, что даёт возможность использовать измерительного средства для фиксации факта поражения цели.
Литература
1. Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. – М.: Радио и связь, 1994.
2. Григоренко В.М. Концептуальные подходы к моделированию боевых действий. Тверь: ВА ВКО, 2010. – 83 с.
3. Дрига В.В. Подгорных Ю.Д. Лобов С.А. Космические и ракетные системы иностранных государств – М.: Тверь 2009 – 302 с.
4. Кузнецов В.И., Чижмаков Ю.А. Эффективность применения военно-технических систем. - Выпуск 2. - Математические методы моделирования и оценивания эффективности операций. — М.: РВСН, 1993.
5. Куроткин В.И., Стерлигов В.Л. Самонаведение ракет. – М.: Военное издательство МО, 1963. 90с.
6. Лысенко Л.Н. Наведение и навигация баллистических ракет. — М.: МГТУ им. Н.Э. Баумана, 2007.
7. Меркулов В.И. Лепин В.Н. Авиационные системы радиоуправления. — М.: Радиотехника, 2003.
8. Неупокоев Ф.К. Стрельба зенитными ракетами. — М.: Военное издательство МО, 1980.
9. Эльясберг П.Е. Введение в теорию полета искусственных спутников Земли. — М.: Наука, 1965.
10. Щит России. Системы противоракетной обороны/В.М.Красковский. М.: МГТУ им. Н. Э. Баумана, 2009. 504с.;
11. Афанасьев И., Лисов И. Китай произвёл перехват в космосе//NOVOSTI-KOSMONAVTIKI.RU: новостной портал о космонавтике.2007.URL.http://www.novosti-kosmonavtiki.ru/content/numbers/290/33.shtml
12. http://nvo.ng.ru/concepts/2011-07-01/11_europro.html
13. http://nvo.ng.ru/concepts/2011-07-01/1_snv.html
14. http://www.fas.org/man/dod-101/sys/ship/weaps/aegis.htm
15. http://www.airwar.ru/enc/weapon/avv_data.html
16. http://www.navytimes.com/news/2007/07/ap_hawaiidefenseradar_070719/
17. http://www.msnbc.msn.com/id/23253805/print/1/displaymode/1098/ 20.02.2008
18. http://www.defenselink.mil/utility/printitem.aspx?print 22.02.2008
19. Резчиков А. Америка попала в цель//VZ.RU: интернет версия деловой газеты «ВЗГЛЯД». 21.02.2008. URL. http://vz.ru/politics/2007/9/29/113342.html
Сайты об американской GBI
· А.Сумин,В.Гиндранков,Г.Колпаков "Интегрированные информационно-огневые системы. Перспективы и проблемы."/www.vko.ru/
· "Зарубежная военная техника. Обзоры" НТЦ "Информтехника" Выпуск 2(126) Ракетная техника 1991 год.
"КБ специального машиностроения: От артиллерийских систем до стартовых комплексов" (под редакцией Ушакова В.С.) .СПб, 2004.
Олег Аксенов, начальник научно-исследовательского центра ракетно-космической обороны 4 ЦНИИ МО РФ Обнаружение и перехват гарантируем «ВПК», № 21, 2011 http://vpk-news.ru/articles/7746
Владимир Василенко, главный научный сотрудник 4 ЦНИИ МО РФ «Чревато нарушением стратегической стабильности» Опубликовано в выпуске № 22 (388) за 08 июня 2011 года http://vpk-news.ru/articles/7746
Ракетные комплексы ПВО: тенденции развития http://oborona.ru" target="_blank" rel="nofollow">http://oborona.ru
2006-05-23 / Андрей Терехов, Виктор Мясников Сбивать «Тополя» над Плесецком
Американцы готовятся отразить нападение Ирана, размещая новые ракеты у границ России http://www.ng.ru/world/2006-05-23/1_topolia.html
МОСКВА , 20 сентября 2011 , ОРУЖИЕ РОССИИ , Станислав Закарян «Очередной этап создания ЕвроПРО завершен» http://www.armsexpo.ru/053049049048124050053049054056.html
Публикации с ключевыми словами: информационное обеспечение, баллистическая цель, противоракетная оборона, ракетный комплекс перехвата
Публикации со словами: информационное обеспечение, баллистическая цель, противоракетная оборона, ракетный комплекс перехвата
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||