научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2013
DOI: 10.7463/0613.0574636
УДК 629.78
Россия, МГТУ им. Н.Э. Баумана
Введение
В настоящее время особый интерес в мире проявляется к космическим аппаратам (КА) малой размерности, вплоть до нано- и пикоспутников [9, 10].
Перспективы применения наноспутников весьма обширны: это отработка новых космических технологий, оперативное дистанционное зондирование Земли, метео- и геологический мониторинг Земли, связь и коммуникации (в том числе высокоширотные), использование нескольких взаимодействующих аппаратов (так называемого «роя») при создании сверхапертурных космических комплексов, проведение отдельных научных экспериментов, исследование новейших материалов в условиях космического полёта и другое.
Для решения многих целевых задач необходимо осуществлять устойчивую ориентацию и стабилизацию углового движения спутника, а также успокоение его угловых колебаний после отделения от ракеты-носителя или разгонного блока. Существующие системы стабилизации и ориентации КА можно разделить на несколько классов [1, 2]: пассивные, использующие гравитационные силы, аэродинамические силы, стабилизацию вращением, стабилизацию давлением солнечных лучей; активные, использующие реактивные двигатели, двигатели-маховики, моментные магнитоприводы; комбинированные (активно-пассивные), использующие различные комбинации активных и пассивных систем. Системы стабилизации и ориентации малых и сверхмалых зарубежных аппаратов являются преимущественно активными, использующими в качестве органов управления моментные магнитоприводы, двигатели-маховики и реактивные двигатели.
Миниатюризация приборного состава и аппаратуры космических аппаратов допускает возможность значительного уменьшения их массо-габаритных характеристик. При этом актуальными являются вопросы создания систем управления такими аппаратами, максимально совмещающих в себе возможности систем управления аппаратов «обычной» размерности и небольшие габариты.
Целью настоящей статьи является формирование облика перспективной активно-пассивной системы управления угловым движением наноспутников, обеспечивающей повышенный срок службы относительно зарубежных аналогов активного типа. Задачами и новизной работы является представление конструктивных особенностей такой системы, разработка методики расчета некоторых параметров двигательной установки. Приведенные в статье наработки базируются на использовании современных методов теории управления, проектирования космических аппаратов, математической логики, с применением математического моделирования.
Основная часть
Предлагаемая активно-пассивная система управления угловым движением наноспутников [7], движущихся по геоцентрическим орбитам, может применяться для поддержания ориентации соответствующей оси аппарата на гравитационный центр планеты либо трехосной стабилизация КА. Системой могут решаться задачи предварительного успокоения аппарата после его отделения от ракеты-носителя (РН) или разгонного блока (РБ), стабилизации углового движения, переориентации КА из одного гравитационно-устойчивого положения в другое.
Пассивная подсистема представляет собой гравитационный стабилизатор (ГС) [4] и демпфер, рассеивающий энергию либрационного углового движения аппарата. Назначение ГС состоит в создании ориентирующего гравитационного момента за счет особой конфигурации эллипсоида инерции КА, например, путём выдвижения балансировочного груза по типу гравитационной штанги. При этом соответствующая ось аппарата будет стремиться к устойчивому положению по направлению центра масс планеты.
Активная подсистема представляет собой блок микрореактивных двигателей (мРД), разработанных по технологии MЭМС (микро-электро-механических систем) [8, 11]. Этот блок размещается на дальнем конце ГС, что обеспечивает наибольшую величину реактивного момента относительно центра масс аппарата.
Габаритные размеры и импульс каждого мРД в блоке достаточно малы (например, импульс твердотопливных мРД составляет ~ 0,1 мН∙с при времени работы 1 мс с тягой 0,1 Н). Поэтому для создания относительно мощного импульса необходима одновременная работа нескольких мРД. В тоже время за счёт малого размера (~ 1 х 2 х 2 мм) одного двигателя и возможности установки в блоке большого их количества обеспечивается достаточно большая гибкость при получении потребного значения импульса.
Твердотопливные мРД предполагают разовое использование, при использовании в блоке жидкостных двигателей их можно заправлять повторно.
Для конкретного КА и программы его полета рассчитывается оптимальное количество мРД, что позволяет реализовать, как в штатных, так и в нештатных ситуациях проведение требуемой серии активных коррекций положения аппарата относительно его центра масс.
Принципиальная схема варианта КА, реализующего предложенную систему управления угловым движением по каналам тангажа и крена, представлена на рис. 1.
Система управления угловым положением может быть построена, например, на основе измерений датчиков углов (ДУ) и датчиков угловых скоростей (ДУС), разработанных по технологии МЭМС [8, 11]. В этом случае конструктивно блок управления мРД находится в корпусе КА (рис. 1). Там же находятся ДУ и ДУС, расположенные по осям связанной системы координат 0xyz аппарата и измеряющие углы крена ![]() (вокруг оси 0x), курса
(вокруг оси 0x), курса ![]() (вокруг оси 0y), тангажа
(вокруг оси 0y), тангажа ![]() (вокруг оси 0z) и угловые скорости
(вокруг оси 0z) и угловые скорости ![]() ,
,![]() ,
,![]() относительно связанной системы координат 0xyz [5]. Для определения пространственных координат ЦМ КА можно использовать, например, приёмник спутниковых навигационных систем ГЛОНАСС, GPS.
относительно связанной системы координат 0xyz [5]. Для определения пространственных координат ЦМ КА можно использовать, например, приёмник спутниковых навигационных систем ГЛОНАСС, GPS.

Рис. 1. Принципиальная схема КА
1 – КА, 2 – блок управления мРД, 3 – демпфер, 4 – ГС, 5 – блок мРД,
6 – орбита КА, 7 – местная вертикаль (положение динамического равновесия ГС),
8 – максимум отклонения ГС от положения динамического равновесия.
С помощью данных, полученных от датчиков, и с учётом целевых задач полёта в блоке управления мРД рассчитываются параметры работы двигательной установки (время включения, ориентация КА, расположение и количество задействуемых мРД).
Математической моделью работы твердотопливного мРД будем считать идеализированную зависимость (в виде ступеньки) тяги от времени работы. Эта зависимость выбрана из условия того, что время переходных процессов углового движения КА значительно больше времени импульса мРД, и поэтому особенности нарастания и спада тяги двигателей учитывать не будем.
Сила и импульс мРД равны:
 , (1)
, (1)
где  – функция Хевисайда (единичная функция), FмРД(t) – зависимость тяги мРД от времени, FмРД = const – уровень тяги мРД, tвкл – момент включения мРД, tвыкл – момент выключения мРД, tраб = tвыкл – tвкл – время работы мРД.
– функция Хевисайда (единичная функция), FмРД(t) – зависимость тяги мРД от времени, FмРД = const – уровень тяги мРД, tвкл – момент включения мРД, tвыкл – момент выключения мРД, tраб = tвыкл – tвкл – время работы мРД.
Обозначим плечи сил мРД по соответствующим каналам следующим образом: ![]() – по каналам тангажа и крена (плечо силы образуется за счет удлинения гравитационной штанги),
– по каналам тангажа и крена (плечо силы образуется за счет удлинения гравитационной штанги),  – по каналу курса (плечо силы образуется за счет особой конструкции блока мРД – на рисунке не показано). Тогда управляющие моменты от мРД в связанной СК запишем следующим образом:
– по каналу курса (плечо силы образуется за счет особой конструкции блока мРД – на рисунке не показано). Тогда управляющие моменты от мРД в связанной СК запишем следующим образом:
 (2)
(2)
где ![]() – рассчитанное в блоке управления мРД количество задействуемых реактивных двигателей в каждом из каналов,
– рассчитанное в блоке управления мРД количество задействуемых реактивных двигателей в каждом из каналов, ![]() – рассчитанные в блоке мРД моменты включения реактивных двигателей по каждому из каналов.
– рассчитанные в блоке мРД моменты включения реактивных двигателей по каждому из каналов.
Алгоритм работы системы управления угловым положением КА может включать в себя четыре режима:
1) режим успокоения углового движения КА;
2) режим ориентации (переориентации) КА;
3) режим стабилизации КА;
4) пассивный режим – управление блоком мРД отсутствует.
После отделения КА от последней ступени РН (РБ) выполняется операция его успокоения: осуществляется развертывание ГС ‑ при этом увеличиваются значения инерционных параметров и, соответственно, уменьшаются значения приобретенных вследствие разделения паразитных угловых скоростей.
Диссипирующие свойства демпфера обеспечивают последующее рассеяние энергии возмущений.
Однако при отсутствии "внешнего трения" этот процесс чрезвычайно растянут во времени и обладает свойством самоподдерживаться вследствие непрерывного изменения направления вектора местной вертикали при орбитальном движении КА.
Пассивный режим используется в случаях, когда не требуется активное управление угловым движением КА относительно его ЦМ и в случае отсутствия необходимости в длительной точной ориентации на планету. В этом режиме энергозатраты системы минимальны.
В других ситуациях применение предложенной активно-пассивной системы позволяет наноспутнику осуществлять успокоение посредством включения мРД (одиночного или залпового), размещаемых в блоке на дальнем относительно центра масс КА конце ГС (рис. 1). Вектор тяги каждого мРД перпендикулярен продольной оси ГС (из условия максимизации момента силы). При этом включение двигателей производится в момент пересечения дальним относительно центра масс КА концом ГС с блоком мРД местной вертикали (рис. 2), что обеспечивает наилучшее (с точки зрения расхода рабочего тела, точности регулирования, потребного силового импульса, простоты программно-аппаратной реализации блока управления включением мРД, времени успокоения КА) проведение режима.
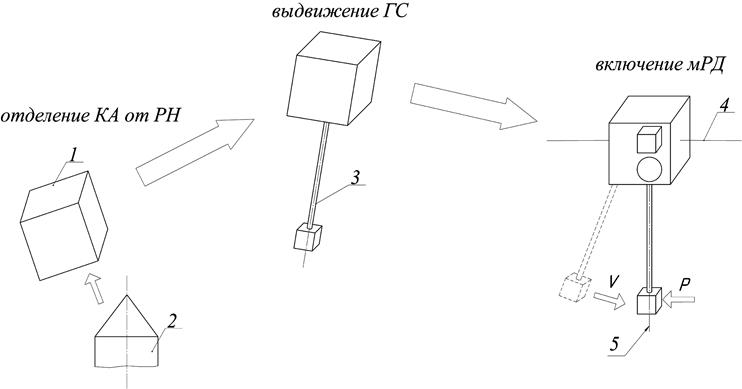
Рис. 2. Схема предварительного успокоения КА
1 – КА, 2 – РН, 3 – ГС, 4 – орбита КА, 5 – местная вертикаль, V – направление движения блока мРД, P – направление вектора тяги мРД.
Аналогично решается задача поддержания заданного положения (в требуемом диапазоне углов, угловых скоростей) главной оси инерции КА в пространстве – т.е. его требуемая стабилизация (рис. 3). Стабилизация наноспутника может осуществляться как в пассивном режиме, так и в активно-пассивном.
Использование мРД существенно уменьшает амплитуду либрационных угловых колебаний и увеличивает быстродействие системы стабилизации. При этом, как правило, задействуется меньшее количество двигателей (поскольку уровень возмущений обычно ниже, чем при успокоении КА).
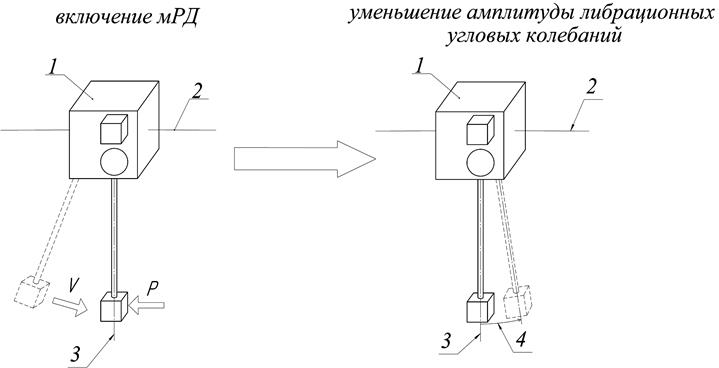
Рис. 3. Схема стабилизации КА
1 – КА, 2 – орбита КА, 3 – местная вертикаль, 4 – максимум отклонения ГС от положения динамического равновесия, V – направление движения блока мРД, P – направление вектора тяги мРД.
Максимальное количество мРД, единовременно задействуемых в режиме успокоения определяется по следующим формулам:
 . (3)
. (3)
Для их задействования информация о значениях (измеряемых ДУСами) угловых скоростей КА  в проекциях на оси связанной СК передаётся в блок управления мРД. Момент включения двигателей блоком управления мРД определяется неравенствами, по показаниям ДУ:
в проекциях на оси связанной СК передаётся в блок управления мРД. Момент включения двигателей блоком управления мРД определяется неравенствами, по показаниям ДУ:
 , (4)
, (4)
где ![]() – величины углов, измеряемые ДУ;
– величины углов, измеряемые ДУ; ![]() – ограничения углов поворота, необходимые для работы соответствующих алгоритмов в блоке управления мРД.
– ограничения углов поворота, необходимые для работы соответствующих алгоритмов в блоке управления мРД.
В момент включения мРД в режиме стабилизации должны выполняться следующие условия:
 ,
,
где – величины угловых скоростей, измеряемые ДУС.
Количество мРД для получения требуемых угловых скоростей КА в режиме стабилизации определяют по формулам:
 (5)
(5)
где  – требуемые величины угловых скоростей.
– требуемые величины угловых скоростей.
Уравнения (3) являются частным случаем уравнений (5) при условии, что  .
.
При осуществлении операции ориентации (переориентации) КА включение мРД производится в момент максимума отклонения продольной оси штанги ГС от положения её динамического равновесия, совпадающего с местной вертикалью (рис. 4). В этом случае главная ось инерции КА переводится из одного гравитационно-устойчивого положения в другое гравитационно-устойчивое положение (при обоих этих положениях продольная ось ГС – ось минимального момента инерции – проходит вдоль местной вертикали).
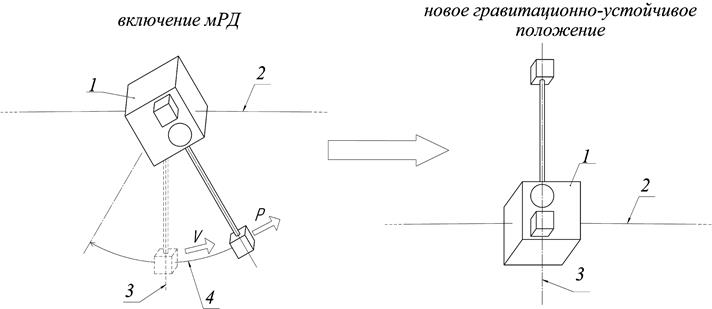
Рис. 4. Схема переориентации КА
1 – КА, 2 – орбита КА, 3 – местная вертикаль 4 – максимум отклонения ГС от положения динамического равновесия, V – направление движения блока мРД, P – направление вектора тяги мРД.
В зависимости от того, по какому из каналов (крена или тангажа) максимальное отклонение от положения динамического равновесия больше, задействуются те или иные мРД. При этом в положении максимального отклонения продольной оси ГС от местной вертикали выполняется условие (6) и происходит смена знака угловых скоростей по каналам крена и тангажа:
 (6)
(6)
Процесс переориентации осуществляется по каналу крена, если выполняются условия (6) и ![]() , или по каналу тангажа, если выполняются условия (6) и
, или по каналу тангажа, если выполняются условия (6) и ![]() .
.
Количество мРД по каналу тангажа определяют по формуле (дается без вывода):
 (7)
(7)
Для управления по каналу крена количество мРД определяют по формуле:
 (8),
(8),
где ![]() - гравитационный параметр планеты,
- гравитационный параметр планеты,
![]() - расстояние от центра Земли и до ЦМ КА.
- расстояние от центра Земли и до ЦМ КА.
Выражения (7) и (8) используются в алгоритме включения мРД при процессе переориентации КА для определения минимального количества задействуемых двигателей. Радиус-вектор КА рассчитывается алгоритмом блока управления мРД, например, с использованием показаний GPS-приёмника.
Заключение
В статье представлен облик перспективной активно-пассивной системы управления угловым движением малых космических аппаратов (на примере наноспутников) на основе гравитационного стабилизатора с микрореактивными двигателями. Описаны режимы работы системы. Приведен расчет предельного количества микрореактивных двигателей для реализации режимов.
Список литературы
1. Алатырцев А.А., Алексеев А.И., Байков М.А. и др. Инженерный справочник по космической технике / под ред. А.В. Солодова. М.: Воениздат, 1977. 430 с.
2. Попов В.И. Системы ориентации и стабилизации космических аппаратов. М.: Машиностроение, 1986. 184 с.
3. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика. В 10 т. Т. 1. Механика. 5-е изд., стереот. М.: Физматлит, 2007. 224 с.
4. Боевкин В.И., Гуревич Ю.Г., Павлов Ю.Н., Толстоусов Г.Н. Ориентация искусственных спутников в гравитационных и магнитных полях. М.: Наука, 1976. 304 с.
5. Белецкий В.В. Движение искусственного спутника относительно центра масс. М.: Наука, 1965. 416 с.
6. Anand D.K., Whisnant J.M., Pisacane V.L., Sturmanis M. The Capture and Stability of the Lidos Gravity-Gradient Satellite in an Eccentric Orbit // AIAA/AAS Astrodynamics Conference, 1969. AIAA Paper No. 69-921. DOI: 10.2514/6.1969-921
7. Палкин М.В., Лавренов А.Н., Леонов А.Г., Петухов Р.А. Способ активно-пассивного успокоения, ориентации и стабилизации космического аппарата : пат. 2463221 РФ. 2012.
8. Hapgood M. Nano Satellite Beacons for Space Weather Monitoring: Final Report. SWNS-RAL-RP-0001. Iss. 1.0. Science & Technology Facilities Council, Rutherford Appleton Laboratory, 28 February 2008. 119 p.
9. Афанасьев И. Космический «детский сад» // Новости космонавтики. 2008. № 6. С. 34-36.
10. Черный И. Кубсаты цвета хаки // Новости космонавтики. 2012. № 12. С. 43.
11. What is MEMS Technology? // Site of MNX® . Режим доступа: http://www.mems-exchange.org/MEMS/what-is.html (дата обращения 02.07.2013).
Публикации с ключевыми словами: система управления, стабилизация, ориентация, космический аппарат, наноспутник, микрореактивные двигатели, МЭМС-технологии
Публикации со словами: система управления, стабилизация, ориентация, космический аппарат, наноспутник, микрореактивные двигатели, МЭМС-технологии
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||