научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2013
DOI: 10.7463/1213.0671097
УДК 629.113
ГНЦ РФ ФГУП «НАМИ», Москва, РФ
НГТУ им. Р.Е. Алексеева, Нижний Новгород, РФ
Общество «Ученые Юга», Израиль
В настоящее время механические трансмиссии с автоматическим управлением нашли широкое промышленное применение в моделях грузовых автомобилей и автопоездов, оборудованных пневматической системой привода тормозов. Данная пневмосистема является энергоисточником для исполнительных пневматических приводов механизмов переключения коробки передач и регулирует момент, передаваемый фрикционным сцеплением. Для управления этими исполнительными механизмами применяются клапанные устройства с приводом от электромагнитов. В свою очередь, данные электромагниты подключаются к источнику электропитания или отключаются от него в зависимости от команд, вырабатываемых электронным блоком, к которому подводятся электрические сигналы от переключаемого водителем контроллера управления.
В связи с широким применением пневматических приводов в общем машиностроении теория и расчет их разработаны достаточно глубоко, и по этим вопросам имеется много литературы [1-4].
Вместе с тем ряд вопросов, связанных с исследованием процесса синхронизации при использовании пневматического привода, разработан недостаточно. Имеющаяся литература по данному вопросу подробно рассматривает процессы синхронизации, протекающие при постоянном моменте синхронизации. Специфика процесса синхронизации при использовании пневматического привода заключается в том, что выравнивание угловых скоростей ведущих и ведомых элементов протекает при переменном синхронизирующем моменте.
Для экспериментального исследования данных процессов использовалась 16-ти ступенчатая механическая синхронизированная коробка передач ТМ16-2000 разработанной Группой КОМ совместно с ФГУП «НАМИ», общие технические характеристики которой представлены в таблице 1, продольный разрез коробки передач (рисунок1), кинематическая схема (рисунок 2) – схема автоматического управления (рисунок 3) и внешний вид (рисунок 4), более детально представленные и описанные в работах [5-8].
Таблица 1. – Общие характеристики объекта исследований
Максимальная мощность двигателя, кВт | 450 | ||
Максимальный крутящий момент, Нм | 2300 | ||
Число передач | 16 | ||
Диапазон передаточных чисел | 17,53 | ||
Типы управления | 1) Автоматическое электропневматическое с помощью микропроцессорных блоков; 2) Командное электропневматическое с помощью контроллера; | ||
Осевой габарит по торцам картера коробки передач, мм | 570 | ||
Масса коробки передач без картера сцепления, кг | 280 | ||
Рисунок 1. – Многоступенчатая механическая синхронизированная коробка передач ТМ16-2000 |
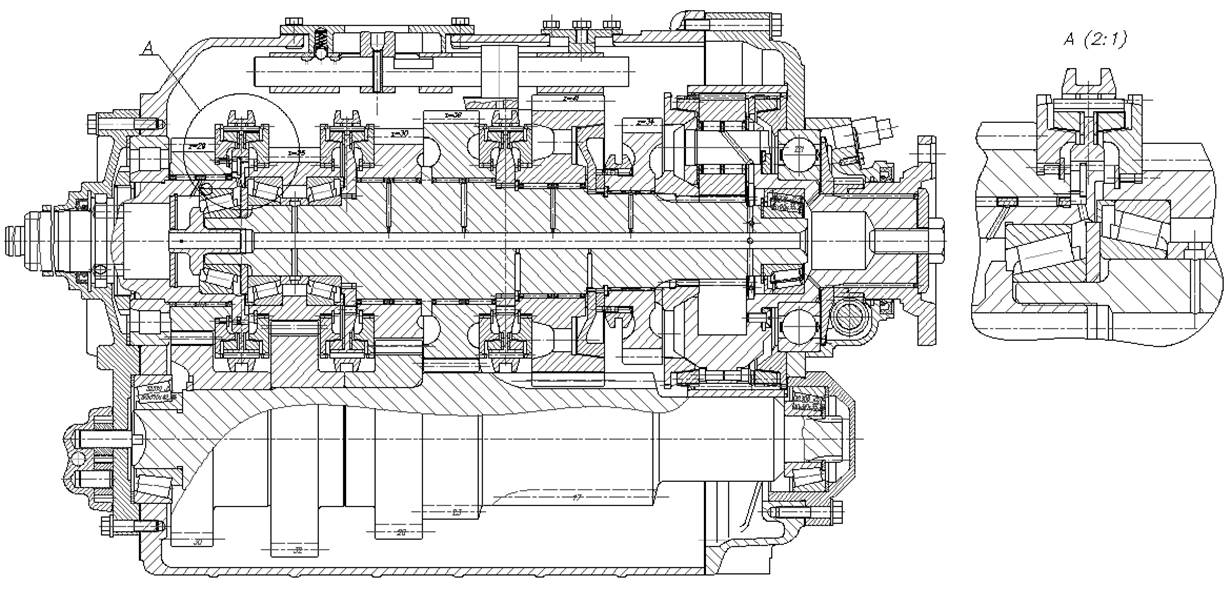
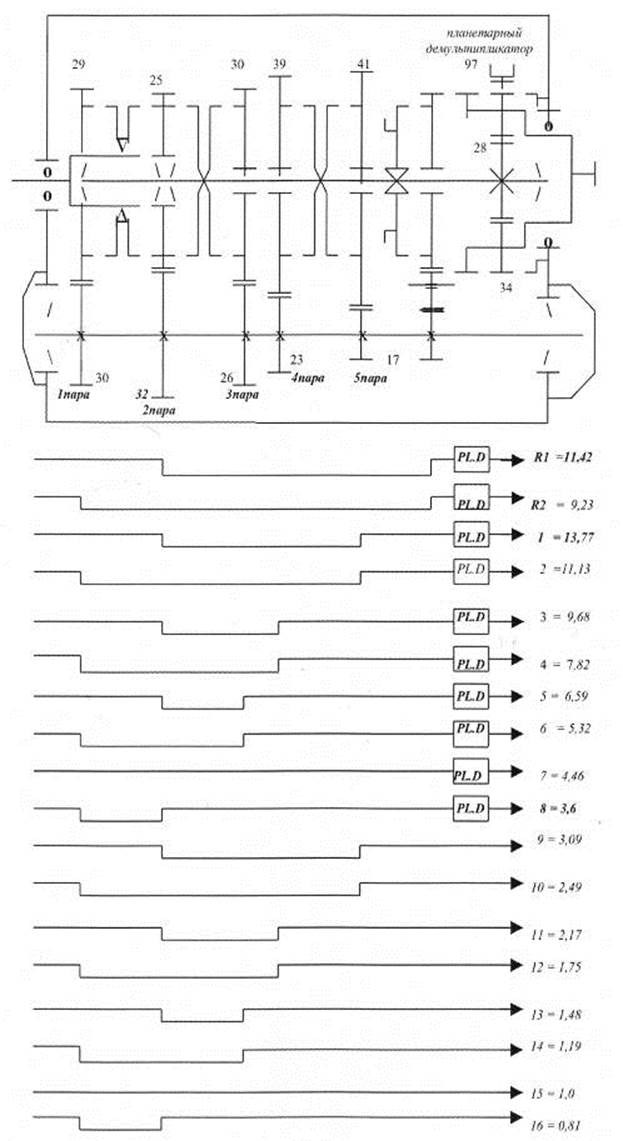
Рисунок 2. – Кинематическая схема и потоки мощности коробки передач М16-2000

Рисунок 3. – Схема системы автоматического управления коробкой передач ТМ16-2000
1 – Контроллер управления коробкой; 2 – Блок согласования; 3 – Монитор; 4 – Механизм управления основным редуктором; 5 – Механизм управления делителем; 6 – Механизм управления демультипликатором; 7 – Механизм управления сцеплением; 8 – Педаль управления подачей топлива;
9 – Блок управления; 10 – Датчик частоты вращения вала двигателя;
11, 12 – Датчик частоты вращения промежуточного и выходного вала
|
|
а) С механическим управлением | б) С автоматическим управлением |
Рисунок 4. – Объект исследования многоступенчатая механическая синхронизированная коробка передач ТМ16-2000 [5, 6]
| |


Экспериментальные исследования проводились на специализированном стенде для испытаний коробок передач с командным и автоматическим управлением, изготовленным в НГТУ. На рисунке 5 представлена схема стенда. Стенд предназначен для проведения испытаний механических коробок передач и мехатронной системы управления при автоматическом или полуавтоматическом режимах работы и отработки алгоритмов управления сцеплением и коробкой передач, а также определения КПД установки, процесса управления сцеплением, делителем, основным редуктором, демультипликатором, исследованием процесса синхронизации.
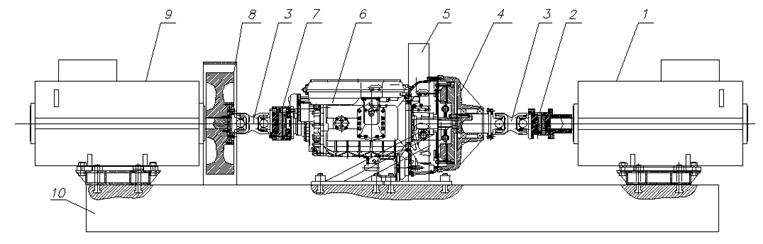
Рисунок 5. – Схема стенда для испытаний многоступенчатых механических синхронизированных коробок передач с командным и автоматическим управлением
На схеме (рисунок 5) обозначено: 1 – приводной электродвигатель, 2 – измерительный фланец TF 214, 3 – карданная передача, 4 – сцепление, 5 – рама стенда, 6 – коробка передач, 7 - измерительный фланец TF 217, 8 – инерционная масса, 9- генератор, 10 – пазовая плита.
Механическая часть стенда состоит из рамы крепления коробок передач, установленной на пазовой плите размерами 5000х2500 мм, на которой размещены приводной электродвигатель, тормозной генератор и испытуемая коробка передач. Внешний вид стенда для испытаний представлен на рисунке 6.
а) |
б) |
в) |
г) |
Рисунок 6. – Внешний вид стенда для испытаний механических многоступенчатых коробок передач с автоматическим управлением (на стенде установлена 16 ступенчатая коробка передач | |




Таблица 2. – Основные технические характеристики стенда для испытаний коробок передач
Тип электродвигателя | постоянного тока |
Марка электродвигателя | 4ПН280S |
Максимальная мощность, кВт | 110 |
Максимальный момент,Нм | 700 |
Обороты двигателя при max моменте, об/мин | 1500 |
Максимальные обороты двигателя, об/мин | 2600 |
Тиристорный преобразователь | ТП-500/460 |
Максимальное давление в пневмосистеме, МПа | 1,6 |
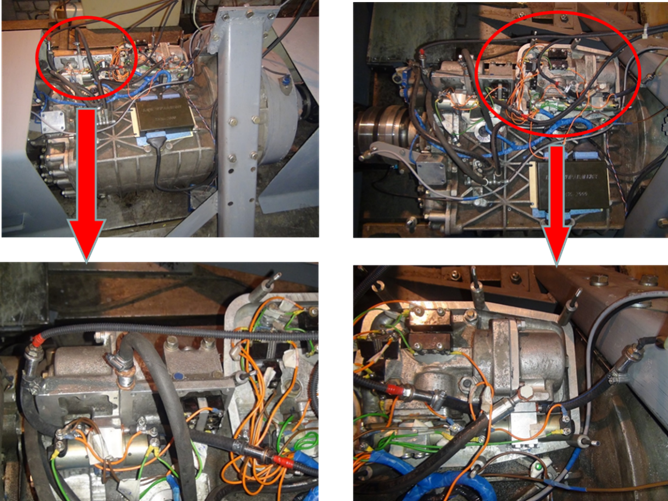
Для оценки работоспособности многоступенчатой механической коробки передач используются бесконтактные датчики оборотов и момента серии TF (Magtrol, Швейцария), датчики давления PWFD-2MPB (ООО «Японские измерительные технологии») и датчик перемещения вилки выключения сцепления DP-1000E(фирмы ООО «Японские измерительные технологии»). На рисунке 7 – представлены датчики давления PWFD-2MPB и способ их установки на коробке передач.
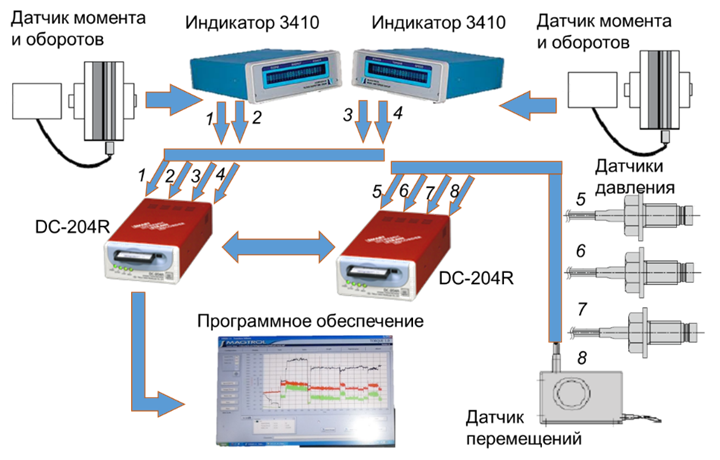
На рисунке 8 представлена принципиальная схема используемой измерительной системы стенда для исследования многоступенчатых механических синхронизированных коробок передач с командным и автоматическим управлением. Информация от датчиков передается на регистрирующую аппаратуру –портативный динамический тензометр DC-204R (фирмы ООО «Японские измерительные технологии»), с которого выводиться через специализированное программное обеспечение на персональный компьютер.
|
Рисунок 7. – Установка датчиков давления PWFD-2MPB на коробке передач |
|
Рисунок 8. – Схема подсоединения измерительной аппаратуры стенда |
В ходе проведения испытаний коробки передач ТМ16-2000 на работоспособность на стенде были исследованы:
- работа электропневматического привода коробки передач;
- работа механизма управления сцеплением;
- динамические нагрузки при переключении передач.
Результаты экспериментальных исследований работы электропневматического привода 16-ти ступенчатой коробки передач представлены на графике (рисунок 9).
|
Рисунок 9. – Экспериментальное исследование работы электропневматического привода |
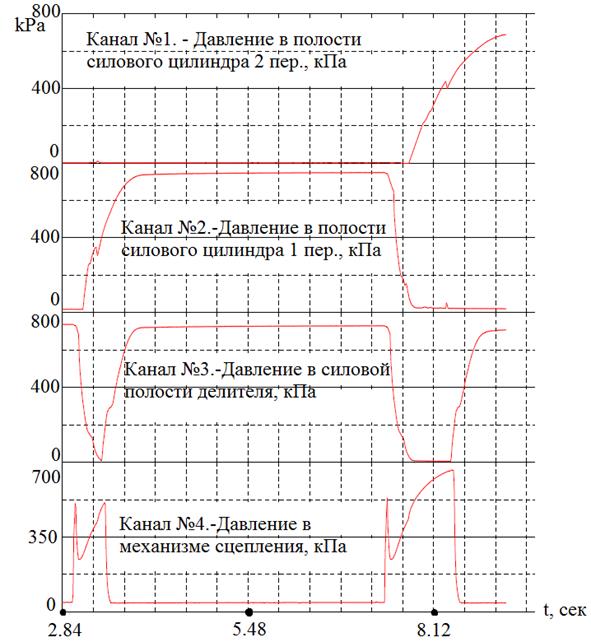
На рисунке 9 представлен экспериментально замеренный процесс нарастания давления в силовом цилиндре основного редуктора, делителя и механизма управления сцеплением при включении второй передачи в коробке и переключении со второй передачи на четвертую.
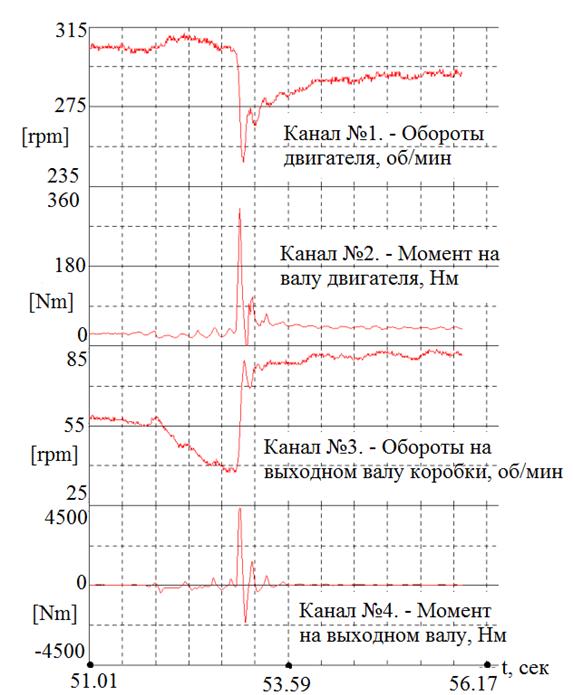
Результаты экспериментальных исследований динамических нагрузок при переключении передач, а также характер изменения моментов и оборотов вала входного и выходного валов за время переключения представлены на рисунке 10. В процессе экспериментальных исследований также производился анализ работы механизма управления сцеплением, регистрируемые данные показаны на рисунке 11.
|
Рисунок 10. – Исследования динамических нагрузок при переключении передач |
|
Рисунок 11. – Экспериментальное исследование работы |
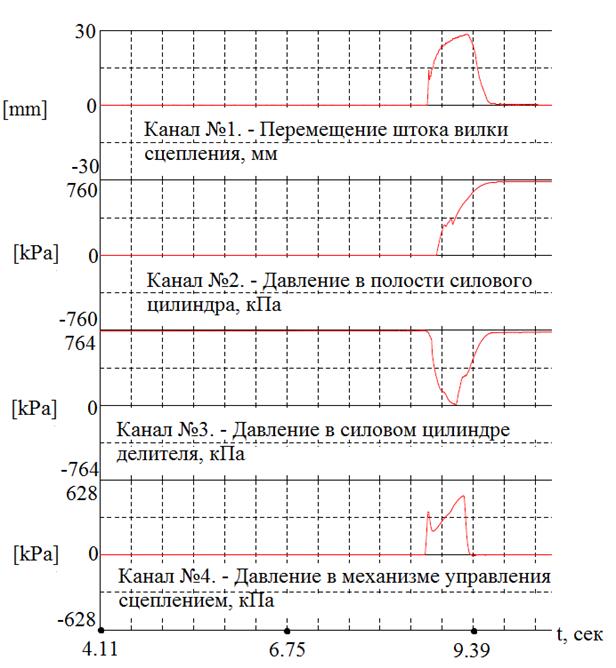
В качестве примера для анализа рассмотрим типовой процесс включения второй передачи в основном редукторе (рисунки 12, 13). При этом в делителе включен высший диапазон, а в демультипликаторе – низший. В процессе экспериментальных исследований регистрировались следующие параметры:
· канал 1 – перемещение вилки выключения сцепления;
· канал 2 – давление в ускорительном механизме сцепления;
· канал 3 –напряжение на концевике выключения сцепления;
· канал 4 – давление в делителе (высший диапазон);
· канал 5 - давление в силовом цилиндре основного редуктора при включении второй передачи;
· канал 6 - давление в силовом цилиндре основного редуктора при включении четвертой передач;
· канал 7 –напряжение на концевике включения передач основного редуктора;
· канал 8 – свободный.
В таблице 3 представлены численные значения основных параметров (по данным представленным на рисунках 12, 13), характеризующих работоспособность многоступенчатой механической синхронизируемой коробки передач ТМ16-2000 с автоматическим управлением при включении второй передачи.
Таблица 3. – Параметры, характеризующие работоспособность коробки передач ТМ16-2000 при включении второй передачи
№ | Название параметра | Значение параметра |
1 | Время начала включения второй передачи, с | 3,08 |
2 | Время завершения включения второй передачи, с | 4,14 |
3 | Общее время включения второй передачи, с | 1,06 |
4 | Время срабатывания концевика на включение сцепления, с | 0,2 |
5 | Время от начала выключения сцепления до момента срабатывания концевика на включ. сцепления, с | 0,94 |
6 | Перемещение вилки в момент срабатывания концевика при выключении сцепления, мм | 22,6 |
10 | Перемещение вилки в момент срабатывания концевика при включении сцепления, мм | 7,7 |
11 | Время включения сцепления (от начала снижения давления, пика до момента времени, когда перемещение вилки равно нулю), с | 0,46 |
12 | Время начала включения второй передачи, с | 3,28 |
13 | Время от момента подачи сигнала на включение передачи до момента начала включения второй передачи, с | 0,2 |
14 | Время срабатывания концевика включения второй передачи, с | 0,3 |
15 | Давление в силовом цилиндре полости включения 2 передачи при срабатывании концевика, кПа | 388,64 |
16 | Время нарастания давления в полости включения 2 передачи силового цилиндра, с | 0,92 |
17 | Среднее давление в полости включения 2 передачи силового цилиндра, кПа | 761 |
18 | Время срабатывания концевика при выключении 2 передачи, с | 0,4 |
19 | Давление в полости включения 2 передачи силового цилиндра при срабатывании концевика в момент выключения передачи, кПа | 166,108 |
На рисунках 14 и 15 представлен пример циклограммы процесса переключения передач инновационной многоступенчатой механической синхронизированной коробки передач ТМ16-2000 с автоматическим управлением. На данной циклограмме представлены следующие данные:
– канал 1 – перемещение вилки выключения сцепления;
– канал 2 – крутящий момент на валу приводного электродвигателя, связанного через сцепление с первичным валом коробки передач;
– канал 3 – частота вращения выходного вала коробки передач;
– канал 4 – крутящий момент на выходном валу коробки передач;
– канал 5 – нарастание давления в силовом цилиндре основного редуктора при включении 4 и 8 передач;
– канал 6 – нарастание давления в силовом цилиндре основного редуктора при включении 2 и 6 передач
– канал 7 - нарастание давления в силовом цилиндре высшего диапазона делителя;
– канал 8 – нарастание давления в механизме управления сцеплением.
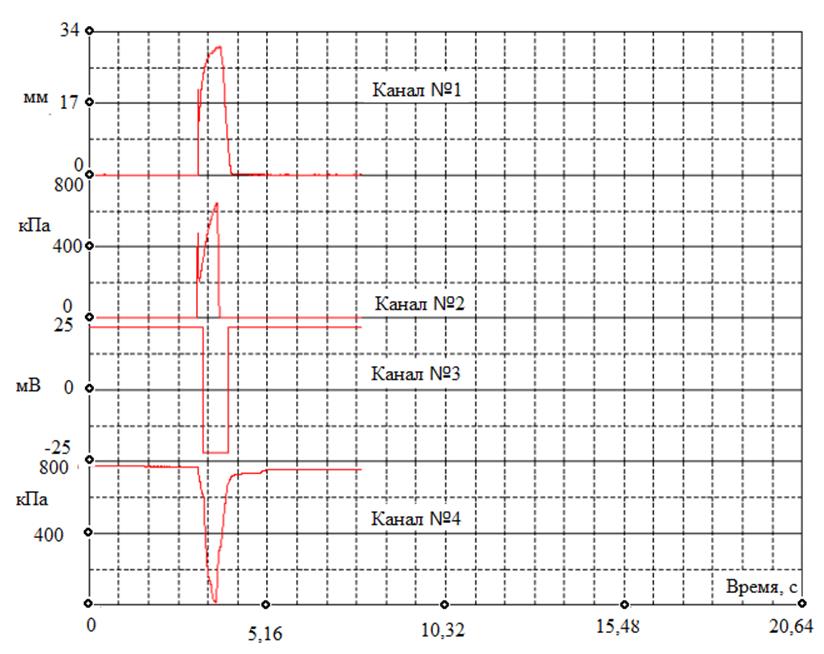
Рисунок 12. – Включение второй передачи. Каналы 1-4

Рисунок 13. – Включение второй передачи. Каналы 5-8
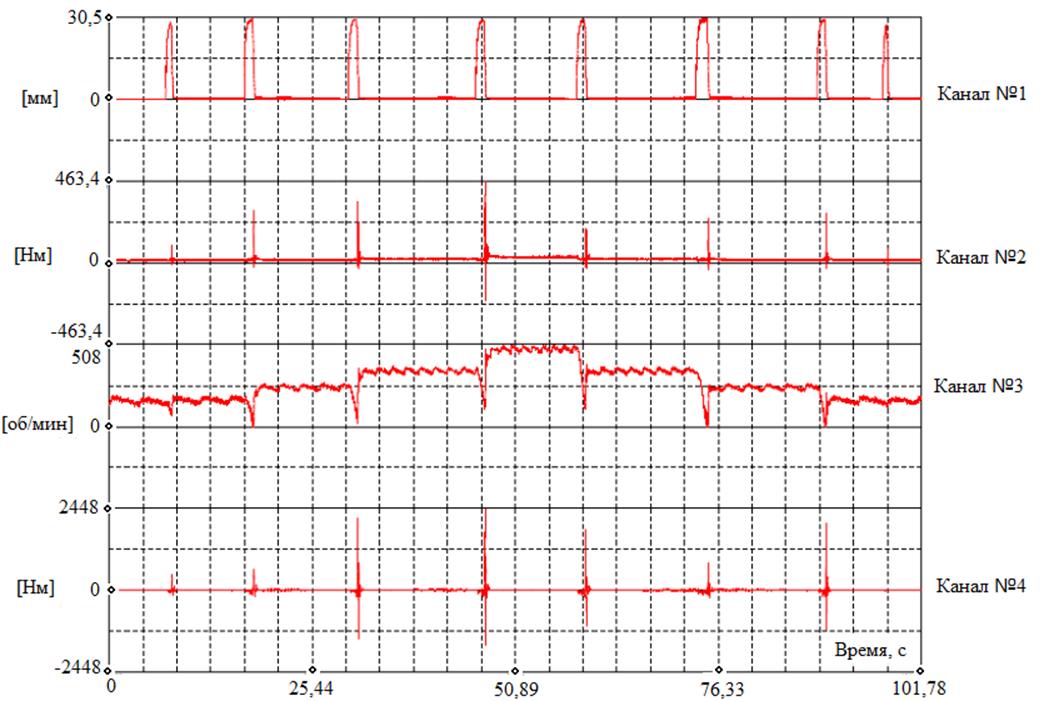
Рисунок 14. – Циклограмма процесса переключения передач:2-4-6-8-6-4-2 (каналы 1-4) коробки ТМ16-2000
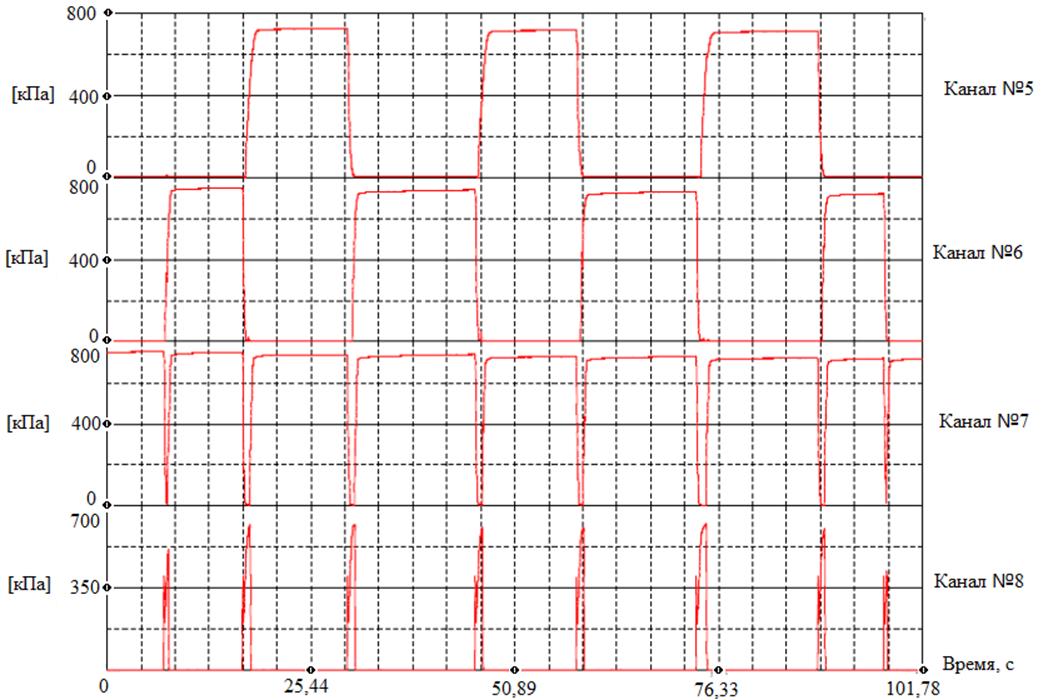
Рисунок 15. – Циклограмма процесса переключения передач:2-4-6-8-6-4-2 (каналы 5-8) коробки ТМ16-2000
Экспериментальные исследования проводились при различных давлениях в пневматической системе, различных оборотах первичного вала и различных значениях диаметра жиклера электромагнитного клапана.
С использованием полученных экспериментальных зависимостей возможно оптимизировать основные параметры пневматического привода, определить теоретические значения времени синхронизации и всего цикла включения передачи, динамические нагрузки на синхронизатор и другие зависимости. На рисунке 16 для этого представлена расчетная схема пневматического привода управления коробкой передач.
Процесс синхронизации при работе с пневматическим приводом в общем случае протекает при переменном давлении в пневматическом цилиндре (рисунок 17) [1-3], которое может характеризоваться:
а) критическим истечением воздуха;
б) подкритическим истечением воздуха;
в) постоянным давлением в пневматическом цилиндре.
|
Рисунок 16. – Расчетная схема пневматического привода управления коробкой передач |

В зависимости от параметров пневматического привода, коробки передач, момента сопротивления движению автомобиля и других факторов процесс синхронизации может закончиться в любой из этих трех зон.
|
Рисунок 17. – Схема процесса включения передачи при переменном давлении в пневматическом цилиндре: к – зона критического истечения; п – зона подкритического истечения; п.д – зона постоянного давления. |

Для определения времени синхронизации и других величин необходимо найти зависимость ![]() для каждой зоны истечения, а также определить время действия каждой из зон [1-3].
для каждой зоны истечения, а также определить время действия каждой из зон [1-3].
Дифференциальное уравнение изменения давления при заполнении постоянного объема для случая, если процесс в полости цилиндра принимается изотермическим, имеет вид
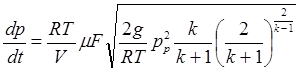 , (1)
, (1)
где ![]() – давление в ресивере, из которого происходит истечение воздуха;
– давление в ресивере, из которого происходит истечение воздуха;![]() – текущее давление в силовом цилиндре,
– текущее давление в силовом цилиндре, ![]() ;
; ![]() – объем цилиндра, в который происходит истечение,
– объем цилиндра, в который происходит истечение, ![]() ;
; ![]() – абсолютная температура воздуха, °К;
– абсолютная температура воздуха, °К; ![]() – газовая постоянная,
– газовая постоянная, ![]() ;
; ![]() – показатель адиабаты для воздуха
– показатель адиабаты для воздуха ![]() ,
, ![]() – ускорение силы тяжести,
– ускорение силы тяжести, ![]() ;
; ![]() – коэффициент расхода;
– коэффициент расхода; ![]() – сечение жиклера, через который происходит истечение воздуха,
– сечение жиклера, через который происходит истечение воздуха, ![]() .
.
Подставляя в уравнение значения постоянных величин, имеем:
 . (2)
. (2)
Разделяя переменные и интегрируя, находим
 , (3)
, (3)
где ![]() – начальное давление в рабочем цилиндре; в частном случае начальное давление в цилиндре может быть равно атмосферному;
– начальное давление в рабочем цилиндре; в частном случае начальное давление в цилиндре может быть равно атмосферному; ![]() – избыточное давление в пневматическом цилиндре.
– избыточное давление в пневматическом цилиндре.
При критическом истечении воздуха в пневматическом цилиндре [1-3] может устанавливаться давление в диапазоне
![]() .
.
Продолжительность критической зоны истечения ![]() найдем, если вместо
найдем, если вместо ![]() подставим его значение
подставим его значение ![]() , соответствующее концу критической зоны истечения. Тогда получим
, соответствующее концу критической зоны истечения. Тогда получим
 . (4)
. (4)
Следовательно, текущее значение времени t при критическом истечении воздуха ограничено диапазоном ![]() .
.
С момента времени tк начинается зона подкритического истечения воздуха. В этом случае при заполнении постоянного объема уравнение изменения давления имеет вид [1-3]
 . (5)
. (5)
Разделяя переменные и интегрируя (5), находим
 , (6)
, (6)
где ![]() и
и ![]() – соответственно начальное и текущее давление в зоне подкритического истечения.
– соответственно начальное и текущее давление в зоне подкритического истечения.
Для вывода интересующих нас зависимостей и получения формул, удобных для инженерных расчетов, после преобразований имеем
 . (7)
. (7)
В этом случае р может принимать значения в диапазоне
![]()
Тогда избыточное давление, способное совершать работу,
 . (8)
. (8)
Продолжительность подкритической зоны истечения ![]() находим из уравнения (7) при подстановке в него
находим из уравнения (7) при подстановке в него ![]() , то есть когда давление в цилиндре достигнет давления в ресивере
, то есть когда давление в цилиндре достигнет давления в ресивере
 . (9)
. (9)
Текущее значение времени в зоне подкритического истечения ограничено диапазоном ![]() .
.
После окончания подкритической зоны истечения процесс включения передачи (если он к этому моменту еще не закончится) будет происходить при постоянном давлении в пневматическом цилиндре ![]() .
.
Текущее значение времени в зоне постоянного давления будет ограничено диапазоном ![]() , где
, где ![]() - продолжительность зоны постоянного давления.
- продолжительность зоны постоянного давления.
Используя расчетную схему, приведенную на рисунке 1, можно написать дифференциальное уравнение движения поршня для 1-го и 2-го этапов, имеющее вид
![]() , (10)
, (10)
где ![]() – масса всех подвижных деталей, связанных с поршнем;
– масса всех подвижных деталей, связанных с поршнем; ![]() – смещение поршня относительно начального положения;
– смещение поршня относительно начального положения; ![]() – жесткость пружины пневматического цилиндра;
– жесткость пружины пневматического цилиндра; ![]() – жесткость пружины фиксатора;
– жесткость пружины фиксатора; ![]() – угол наклона лунки фиксатора;
– угол наклона лунки фиксатора; ![]() – сила предварительного сжатия пружины пневматического цилиндра;
– сила предварительного сжатия пружины пневматического цилиндра; ![]() – сила предварительного сжатия пружины фиксатора;
– сила предварительного сжатия пружины фиксатора; ![]() – сила трения, которая определяется суммой двух сил:
– сила трения, которая определяется суммой двух сил:
![]() . (11)
. (11)
Здесь ![]() – постоянная сила трения;
– постоянная сила трения; ![]() – сила трения, пропорциональная величине давления в пневматическом цилиндре;
– сила трения, пропорциональная величине давления в пневматическом цилиндре; ![]() – коэффициент пропорциональности.
– коэффициент пропорциональности.
С учетом дифференциального уравнения (10) определим динамические усилия, возникающие на конусах синхронизатора при переключении передач.
В реально выполненных конструкциях ступенчатых коробок передач при рассмотрении соприкосновения конусов синхронизатора в процессе включения передач имеем многомассовую колебательную систему (рисунок 18) [1, 4].
Определим в начале максимальное значение усилия, возникающего в процессе удара, используя следующие допущения:
1) удар считаем абсолютно неупругим при определении конечной скорости соударяемых элементов;
2) изменением возмущающей силы за время удара пренебрегаем ввиду малого промежутка времени.
|
Рисунок 18 – Расчетная схема до схождения (а) и после схождения конусов трения (б). |

В результате преобразований получим
 ,
,
где m – масса синхронизатора, ![]() - жесткость синхронизатора, М – масса деталей вторичного вала, включая и сам вторичный вал,
- жесткость синхронизатора, М – масса деталей вторичного вала, включая и сам вторичный вал, ![]() - осевая жесткостью подшипников вторичного вала,
- осевая жесткостью подшипников вторичного вала, ![]() – коэффициент трения конических поверхностей в осевом направлении.
– коэффициент трения конических поверхностей в осевом направлении.
Подставляя значение ![]() по уравнению (10), получим равенство для определения силы
по уравнению (10), получим равенство для определения силы ![]() при соударении двух масс в зоне критического истечения:
при соударении двух масс в зоне критического истечения:
 . (12)
. (12)
Для зоны подкритического истечения имеем
 . (13)
. (13)
Определим время удара
 . (14)
. (14)
Подставив в (14) значение ![]() ,
, ![]() и
и ![]() , получим
, получим
 . (15)
. (15)
Считая, что в дальнейшем после схождения конусов трения будет одномассовая колебательная система (рисунок 18, б) и принимая в первом приближении, что трение пропорционально скорости перемещения поршня, для случая критического истечения, можно написать дифференциальное уравнение
![]() , (16)
, (16)
где ![]() ,
,
 ; (17)
; (17)
![]() ; (18)
; (18)
![]() . (19)
. (19)
Для случая подкритической зоны истечения можно получить дифференциальное уравнение движения поршня вида:
 (20)
(20)
Это уравнение действительно при ![]() .
.
Таким образом, можно записать следующую зависимость для момента синхронизации в зоне критического истечения:
 . (21)
. (21)
Время протекания момента синхронизации в зоне критического истечения (рисунок 17) равно
 . (22)
. (22)
Текущее значение времени в зоне критического истечения будет ограничено диапазоном
![]() . (23)
. (23)
Используя зависимость (21), получим следующее окончательное выражение для синхронизирующего момента в зоне критического истечения:
 . (24)
. (24)
Аналогично рассуждая, используя выражение (7), (13), (16), после простейших выкладок можем написать зависимость момента синхронизации для зоны подкритического истечения, если процесс синхронизации начался в зоне критического истечения:
 . (25)
. (25)
Время действия синхронизирующего момента в подкритической зоне истечения будет ограничено диапазоном
![]() . (26)
. (26)
Если процесс синхронизации начнется только в зоне подкритического истечения, то, как не трудно убедиться момент синхронизации будет определяться уравнением
 . (27)
. (27)
Предельно возможное в этом случае время синхронизации в зоне подкритического истечения определим выражением
 . (28)
. (28)
Текущее значение времени в этом случае будет диапазоном
![]() . (29)
. (29)
Значение синхронизирующего момента для зоны постоянного давления будет выражаться зависимостью
 . (30)
. (30)
Время действия синхронизирующего момента в зоне постоянного давления будет (рисунок 17) ограничено диапазоном
![]() . (31)
. (31)
С целью определения интересующих нас параметров процесса синхронизации (рисунок 19), напишем дифференциальные уравнения моментов количества движения для деталей, связанных с первичным валом коробки передач, и звеньев автомобиля, связанных со вторичным валом коробки передач. Для случая переключения с низшей передачи на высшую дифференциальные уравнения имеют вид [1, 4, 7, 8]:
![]() ; (32)
; (32)
![]() . (33)
. (33)
При переходе с высшей на низшую передачу имеем:
![]() ; (34)
; (34)
![]() . (35)
. (35)
|
Рисунок 19 –Расчетная схема для исследования параметров процесса синхронизации |
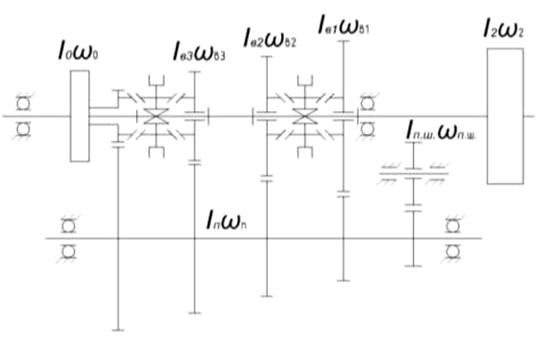
В выражениях (32)-(35), а также на рисунке 19 обозначено:
![]() - момент инерции ведомого диска и ведущих частей коробки, приведенный к шестерне включаемой передачи, Н×м×с2;
- момент инерции ведомого диска и ведущих частей коробки, приведенный к шестерне включаемой передачи, Н×м×с2;
![]() - момент инерции ведомого диска сцепления и первичного вала, Н×м×с2;
- момент инерции ведомого диска сцепления и первичного вала, Н×м×с2;
![]() - момент инерции промежуточного вала со всеми закрепленными на нем шестернями, Н×м×с2;
- момент инерции промежуточного вала со всеми закрепленными на нем шестернями, Н×м×с2;
![]() - момент инерции паразитной шестерни заднего хода, Н×м×с2;
- момент инерции паразитной шестерни заднего хода, Н×м×с2;
![]() ,
,![]() ,
,![]() - моменты инерции шестерен постоянного зацепления, расположенных на выходном валу коробки передач, Н×м×с2;
- моменты инерции шестерен постоянного зацепления, расположенных на выходном валу коробки передач, Н×м×с2;
![]() - угловая скорость первичного вала, 1/с;
- угловая скорость первичного вала, 1/с;
![]() - угловая скорость промежуточного вала, 1/с;
- угловая скорость промежуточного вала, 1/с;
![]() - угловая скорость паразитной шестерни заднего хода, 1/с;
- угловая скорость паразитной шестерни заднего хода, 1/с;
![]() - угловая скорость шестерни включаемой передачи, 1/с;
- угловая скорость шестерни включаемой передачи, 1/с;
![]() - угловая скорость вторичного вала коробки передач, 1/с;
- угловая скорость вторичного вала коробки передач, 1/с;
![]() ,
,![]() ,
,![]() - угловые скорости шестерен постоянного зацепления, расположенных на выходном валу, 1/с.На основании равенства кинетических энергий, а также принимая во внимание, что
- угловые скорости шестерен постоянного зацепления, расположенных на выходном валу, 1/с.На основании равенства кинетических энергий, а также принимая во внимание, что
 ;
;  ;
;  ;
;  ;
;  ,
,
можем записать
 ,
,
где ![]() - момент инерции ведущих частей коробки передач, приведенный к первичному валу.
- момент инерции ведущих частей коробки передач, приведенный к первичному валу.
Тогда инерционный момент ведущих частей коробки передач, приведенный к включаемой шестерне равен
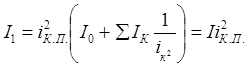 , (36)
, (36)
где ![]() - момент инерции любого звена, связанного передаточным отношением
- момент инерции любого звена, связанного передаточным отношением ![]() с первичным валом;
с первичным валом; ![]() - передаточное число включаемой передачи.
- передаточное число включаемой передачи.
![]() - момент инерции автомобиля, а также вращающихся деталей трансмиссии и ходовой части при выключенной передаче, приведенный к выходному валу коробки передач.
- момент инерции автомобиля, а также вращающихся деталей трансмиссии и ходовой части при выключенной передаче, приведенный к выходному валу коробки передач.
![]() - момент сопротивления машины, приведенный к выходному валу коробки передач.
- момент сопротивления машины, приведенный к выходному валу коробки передач.
![]() - момент трения ведущих частей коробки, приведенный к включаемой шестерне, вызванный потерями на разбрызгивание масла и трение в опорах, определяемый экспериментально.
- момент трения ведущих частей коробки, приведенный к включаемой шестерне, вызванный потерями на разбрызгивание масла и трение в опорах, определяемый экспериментально.
![]() .
.
Здесь![]() - момент трения на первичном валу коробки передач.
- момент трения на первичном валу коробки передач.
Момент трения вилки о муфту синхронизатора равен
![]() , (37)
, (37)
где ![]() - рабочая площадь поршня пневмоцилиндра;
- рабочая площадь поршня пневмоцилиндра; ![]() - средний радиус поверхности трения муфты синхронизатора;
- средний радиус поверхности трения муфты синхронизатора; ![]() - коэффициент трения скольжения вилки по муфте синхронизатора;
- коэффициент трения скольжения вилки по муфте синхронизатора; ![]() - величина свободного давления, создающего осевую силу на вилке.
- величина свободного давления, создающего осевую силу на вилке.
Момент ведения в дисках сцепления, приведенный к шестерне включаемой передачи, определяется выражением
![]() , (38)
, (38)
где![]() - момент ведения сцепления на первичном валу коробки передач.
- момент ведения сцепления на первичном валу коробки передач.
По представленным теоретическим зависимостям (1)-(38) были получены параметры синхронизации при включении второй передачи в коробке (высший диапазон делителя, низкий демультипликатора и первая передача в основном редукторе, соответствующая 5 паре на рисунке 2). В таблице 4 представлены полученные результаты расчетов и экспериментов.
Расчетные значения времени синхронизации по отдельным этапам и по всему циклу включения передачи отличаются от экспериментальных не более чем на 10-25%.
Таблица 4 – Результаты экспериментальных и расчетных значений при работе с электропневматическим приводом
Вид смазки – масло МС-20. Температура 325-3350К. Обороты вторичного вала n2=0.
Приведенный момент инерции включаемой передачи – Y1=0,472 Нм*сек2
№ | Результат | Величина давления, Н/м2 | Обороты первичного вала к началу синхронизации n1, об/мин | Диаметр жиклера d, м2 | Время от момента поступления воздуха до момента соприкосновения конусов трения, с | Время синхронизации в зоне критического истечения, с | Время синхронизации в зоне подкритического истечения, с | Время синхронизации в зоне постоянного давления, с | Полное время синхронизации, с |
1 | Экспер. | 6,2·105 | 2000 | 2·10-3 | 0,17 | 0 | 0,29 | 0,6 | 0,79 |
2 | 0,18 | 0,83 | |||||||
3 | 0,18 | 0,82 | |||||||
4 | Расчетн. | 0,18 | 0,89 | ||||||
5 | Экспер. | 7,9·105 | 1060 | 2·10-3 | 0,13 | 0,04 | 0,30 | 0,033 | 0,36 |
6 | 0,14 | 0,35 | |||||||
7 | 0,13 | 0,33 | |||||||
8 | Расчетн. | 0,14 | 0,34 | ||||||
9 | Экспер. | 8·105 | 2650 | 2·10-3 | 0,14 | 0,043 | 0,30 | 0,33 | 0,85 |
10 | 0,14 | 0,83 | |||||||
11 | 0,14 | 0,82 | |||||||
12 | Расчетн. | 0,14 | 0,74 | ||||||
13 | Экспер. | 8,6·105 | 1080 | 2·10-3 | 0,13 | 0,055 | 0,278 | 0 | 0,33 |
14 | 0,13 | 0,32 | |||||||
15 | 1090 | 0,13 | 0,33 | ||||||
16 | 8,5·105 | 1080 | 0,13 | 0,35 | |||||
17 | Расчетн. | 8,6·105 | 0,13 | 0,33 | |||||
18 | Экспер. | 8,6·105 | 1700 | 2·10-3 | 0,13 | 0,05 | 0,3 | 0,102 | 0,47 |
19 | 0,13 | 0,48 | |||||||
20 | Расчетн. | 0,13 | 0,46 | ||||||
21 | Экспер. | 8,4·105 | 2450 | 4·10-3 | 0,05 | 0,025 | 0,14 | 0,432 | 0,51 |
22 | 2540 | 0,05 | 0,54 | ||||||
23 | 2560 | 0,04 | 0,55 | ||||||
24 | Расчетн. | 2500 | 0,064 | 0,60 | |||||
25 | Экспер. | 9,4·105 | 2600 | 4·10-3 | 0,04 | 0,034 | 0,14 | 0,335 | 0,51 |
26 | Расчетн. | 0,058 | 0,51 |
Таким образом, можно сформулировать следующие основные результаты данной работы.
1) Получены теоретические зависимости, позволяющие увязать и рассчитать основные параметры пневматического привода (![]() и др.) в зависимости от параметров двигателя
и др.) в зависимости от параметров двигателя ![]() , коробки передач (
, коробки передач (![]() и др.), автомобиля
и др.), автомобиля ![]() и др.) и условий сопротивления движению (
и др.) и условий сопротивления движению (![]() ) при протекании процесса синхронизации при переменном давлении с различным истечением воздуха в пневматический цилиндр: а) критическом, б) подкритической и в) при постоянном давлении.
) при протекании процесса синхронизации при переменном давлении с различным истечением воздуха в пневматический цилиндр: а) критическом, б) подкритической и в) при постоянном давлении.
2) Определены теоретические зависимости момент синхронизации и динамического усилия на конусах синхронизатора при переключении передач и с учетом переменного давления в пневматический цилиндр с различным истечением воздуха: а) критическом, б) подкритической и в) при постоянном давлении.
3) Определены аналитические зависимости для времени синхронизации и результирующей угловой скорости вращения системы после синхронизации в зоне критического, подкритического истечения воздуха в пневматический цилиндр и при постоянном давлении в нем при переключении на высшую и на низшую передачи.
4) Проведены экспериментальные исследования на стенде процесса синхронизации инновационной синхронизированной многоступенчатой коробки передач с автоматизированным управлением при различных диаметрах жиклера электропневматических клапанов, оборотах первичного вала и давлении в ресивере.
5) Получены результаты расчета, которые достаточно хорошо согласуются с результатами эксперимента. Расчетные значения времени синхронизации по отдельным этапам и по всему циклу включения передачи отличаются от экспериментальных не более чем на 10-25%.
В заключении следует отметить, что данная работа проводилась при финансовой поддержке Министерства науки и образования РФ в рамках ФЦП «Научные и научно-педагогические кадры инновационной России на 2009-2013 г.г.» по соглашению № 14.B37.21.1220 от 14.09.2012 г.
Список литературы
1. Недялков А.П. Исследование процесса синхронизации в коробках передач, работающих с пневматическим приводом // Труды «НАМИ». Вып. 72. М.: «НАМИ», 1965. С. 135-191.
2. Johansen T.A., Bratli C. Sliding Mode Control of an Electro-Pneumatic Clutch Actuator. Norwegian University of Science and Technology Department of Engineering Cybernetics, 2008. 90 p.
3. Hazem I.A., SamsulBahari B Mohd Noor, Bashi S.M., Marhaban V.H. A Review of Pneumatic Actuators (Modeling and Control) //Australian Journal of Basic and Applied Sciences. 2009. Vol. 3, no. 2. P. 440-454.
4. Andreasson S., Reinholds M. Dynamic gear shifting of an automated manual transmission. Lund Universtity, 2013. 76 p.
5. Недялков А.П., Блохин А.Н. Применение опережающих технических решений при создании механических ступенчатых коробок передач с автоматизированным управлением // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 2. Режим доступа: http://technomag.edu.ru/doc/165381.html (дата обращения 01.11.2013).
6. Блохин А.Н., Маньковский В.В., Недялков А.П. Инновационные коробки передач «КОМ-НАМИ» с механическим и автоматизированным управлением // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 9. Режим доступа: http://technomag.edu.ru/doc/214551.html (дата обращения 01.11.2013).
7. Недялков А.П., Трикоз А.А. Расчет основных элементов синхронизаторов коробки передач // Автомобили и двигатели: сб. науч. трудов. Вып. 230. М.: ГНЦ РФ - ФГУП «НАМИ», 2002. С. 160-169.
8. Недялков А.П. Анализ процесса разблокировки синхронизатора коробки передач // Труды «НАМИ». Вып. 72. М.: «НАМИ», 1965. С. 191-200.
Публикации с ключевыми словами: испытательный стенд, пневматический привод, многоступенчатые коробки передач, процесс синхронизации, управление сцеплением
Публикации со словами: испытательный стенд, пневматический привод, многоступенчатые коробки передач, процесс синхронизации, управление сцеплением
Смотри также:
- Создание экспериментального стенда для моделирования нагрузок на роторе нефтяного магистрального насоса тип НМ с целью прогнозирования его ресурса
- Выбор схемы и определение оптимальных параметров системы охлаждения стенда для проведения низкотемпературных испытаний приборов автоматической межпланетной станции
- 77-30569/259403 Численное исследование вариантов компоновки основного резервуара стенда для натурных испытаний магистральных нефтяных насосов
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||